
- �쿨�C����ʾ�������C�S��ȫ����
- �쿨�C����ʾ�����S�������ϵij�Ҋԭ��
- �쿨�C����ʾ�������Iʧ�`���ϾS��
- kuka�쿨KR60-3ʾ�����W���S��
- kuka�쿨�C����KR1000ʾ���������S��




�쿨KUKA�C�����ⲿ�Ԅ��\��ģʽ���^�̺�����
�P�I�~: �쿨,KUKA,�C����,�ⲿ,�Ԅ�,�\��,ģʽ,�^��,����, 2019-12-02���ò������ⲿ�Ԅ��\�� 1.ͨ�^�ⲿ�Ԅ��\�нӿڿ����ϼ���������������һ��PLC�������ƙC�����M�� 2.�ϼ�����ϵ�yͨ�^�ⲿ�Ԅ��\�нӿ���C���˿���ϵ�y�l���C�����M�̵����P��̖ �����\���S�ɡ����ϴ_�J�����ӵȣ����C���˿���ϵ�y���ϼ�����ϵ�y�l�� ... [ȫ��]

��ô��һ���̶������M���ք��Ƅӎ쿨�C����
�P�I�~: ��ô,һ��,�̶�,����,�M��,�ք�,�Ƅ�,�쿨,�C����,һ�� 2019-09-27��һ���̶������M���ք��Ƅ� ���c�͑����I��ijЩ���a�ͼӹ��^��Ҫ��C���˲������������ǹ��ߡ����c�ǣ������o���ȷ��úñ��ܼӹ�����˿ɹ�ʡ�A�o���b�����磬�@�m����������r�� ճ�ӣ����ӣ��ȵ� �D 2-16: �̶�����ʾ�� ע�⣺���˞����óɹ����̣��� ... [ȫ��]
kuka�C�����ڻ�����ϵ����ô�Ƅ�
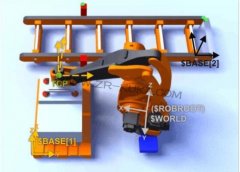
�P�I�~: kuka,�C����,����ϵ,��ô,�Ƅ�,����ϵ,�\��,2-14 2019-09-26�ڻ�����ϵ���\�� �D 2-14: ������ϵ�е��ք��Ƅ� ������ϵ�f�� �C���˵Ĺ��߿��Ը���������ϵ�����˷����\�ӡ�������ϵ���Ա����y���������Խ����ع���߅��������֧������؛�P�{���ˑB���ɴ˿����M�����m���ք��Ƅӣ� �ڴ��^���У� ������Ҫ�ęC�����SҲ�� ... [ȫ��]

KUKA�쿨C4�C���˱��B֮���Q��늳ؽ̳�
�P�I�~: �C����,���Q,��늳�,�P��,KUKA,�C����,���Q,��늳�, 2019-09-23�P��KUKA C4�C���˸��Q��늳ص��f���ęn�� Ŀǰ��KRC4�C���˵���늳صİ��bλ���ЃɷN��һ�����ڹ��T�ϣ�һ��������sͨ�����棬��늳��c���Ʋ����ϵIJ��^X305�B�ӣ�������F305̖�۽z���o������ϵ�y���S�r��늳ز��^X305�я�CCU�аγ����Է�ֹ��늳ؽ�PMB�^ ... [ȫ��]

�쿨KUKA�C�����\�еķ�ʽ����Щ
�P�I�~: �쿨,KUKA,�C����,�е�,��ʽ,��Щ,KUKA,�C��,�� 2019-09-19KUKA �C���˵��\�з�ʽ T1 ���ք������\�У� ���ڜyԇ�\�С����̺�ʾ�� ������Еr������ٶȞ� 250 mm/s �ք��\�Еr������ٶȞ� 250 mm/s T2 ���քӿ����\�У� ���ڜyԇ�\�� ������Еr���ٶȵ��ھ����O�����ٶȣ� �ք��\�У� �o���M�� AUT ���Ԅ��\�У� ... [ȫ��]
KRC2�C���ˮaƷ�W���f��
�P�I�~: KRC2,�C����,�aƷ,�W��,�f��,1.1,Ŀ��,Ⱥ�w,�īI 2019-08-281.1 Ŀ��Ⱥ�w ���īIᘌ���������֪�R���Ñ��� .. ���и�늚⼼�g֪�R .. ���ЙC���˿���ϵ�y�����g֪�R .. ���� Windows ����ϵ�y�����g֪�R �҂����]�͑��ڎ쿨�WԺ�M����Ӗ���Ա�������ѷ�ʽʹ���҂��ĮaƷ�����P��Ӗ�Ŀ��ϢՈ�L����˾��� www.z ... [ȫ��]

KUKA�C����EthernetIPͨӍ�������÷���
�P�I�~: KUKA,�C����,EthernetIP,ͨӍ,����,����,�� 2019-08-231. ���ѽ�ʹ��workvisual ܛ���љC���˵�ԭʼ�ij���ͅ������d�ρ�֮���Կ����Ŀ�ĽY��������ʾ���p��Ethernet/IP ,�ɏ������®���F�ڿ��Խ�������������scanner IP address��ݔ��C���˵�IP ��ַ192.168.7.27 �������x�Ϳ��ԅ������DƬ����ʾ�M��ݔ ... [ȫ��]

�쿨�C�����O��ͨӍ������
�P�I�~: �쿨,�C����,�O��,ͨӍ,����,5.2.1,�C��,���c,PL 2019-08-225.2.1 �C�����cPLC �ӿ�ͨӍ �F������Profibus �������D2.1 �� �D2.1 1.1 ���F���������Cճ�N���Ŀ�в������E���£� �ڴ����Ŀ�Y�����x헿��O����չ�_���νY����ֱ�����c�����Y����Ҋ�� �����I�c�������Y���������P�ˆ����x�����ӡ����� DTM �x���S�����_ ... [ȫ��]

HR20-1700-C10�C�����քӲ���ʾ��
�P�I�~: HR20-1700-C10,�C����,�ք�,����,ʾ��,HR2 2019-08-13HR20-1700-C10�C�����քӲ���ʾ�� ������Ҫ�v���քӲ���HR20-1700-C10 ϵ�ЙC���˵����P���ݣ�����ϵ�Ķ��x�����O�ã��քӲ����ķ������ٶ��O�ü��քӲ����r����B�Ĵ_�J��ͨ�^���µČW�����Ñ��������քӲ����ķ����Ϳ��g����ϵ�đ��ã�����Ҫ���ǣ��Ñ��� ... [ȫ��]

��ô���ęC����ϵ�y�Ć������
�P�I�~: ��ô,����,�C����,ϵ�y,����,���,��׃,����,���,�@�� 2019-08-12��׃������� �@���x헴_��һ������ϵ�y���ь���ͬ�ӵ����ͨ���� ���@��ܛ�P�����oЧ�����˰��bһ���µIJ���ϵ�y��ԓ�O����Ҫ��׃�� �����ˆ��x���x�SOYO COMBO Feature �����»�܇�I�� ���в�D�У� �H... �����b������Ҫ�ġ� �ü��^�I�x��ݔ�롣�� ... [ȫ��]
KUKA�C����KRC4��ô�ք��\�и����S
�P�I�~: KUKA,�C����,KRC4,��ô,�ք�,�\��,����,����,�� 2019-08-09�����S����ͨ�^���g��ˁ��\�С� ����x���� ���g��� �\��ģʽ���tֻ���ÿ��g��ˁ��ƄәC���ˡ� �������S�t������\���I���\�С� ǰ��l�� �\��ģʽ �\���I �Ѽ�� �\�з�ʽ T1 �������E 1. �����Ƅ��x헴����еİ��I�x헿����x����ϣ�����\��ϵ�y������ ... [ȫ��]

KUKA�쿨�C����KRC2ʾ������������Ԕ���f��
�P�I�~: KUKA,�쿨,�C����,KRC2,ʾ��,����,����,Ԕ��,�f 2019-07-301 KUKA ʾ����(KCP) 2 ģʽ�x���_�P 3 ģʽ�б� 4 ʾ�������ڲ��� 5 �����@ʾ 6 �����x���I 7 ܛ���I 8 ��B���� 9 ��Ϣ���� 10 ��Ϣ��� ��ʾ-���磺 �����I�ʂ�;w ��B-���磺 ��ͣ �_�J��֪. -���磺 �_�J.��ͣ �ȴ�-���磺 �ȴ�$IN[1]= =True ��Ԓ-�� ... [ȫ��]