



�����Zؐ����������Փ����W�������·�M������1959����������������C�����β����뷨��������Ԓ�f�����nj�“����t��”���¡��S���{�ӹ����g�İlչ���ӹ��@Щ���Ա����µ�“����t��”�ɞ�F�����˂�ͨ�����@Щ“����t��”�Q�������{�C���ˡ�
����Ȼ�����������\�ӆ��l�������{�C���˽�Щ��õ��ˏV�����Pע�c�о���ͨ�^늈����ň���������ֶο�����Ч�����@Щ�{�C���ˣ��ڟo�����g������ˎ���\ݔ��������Йz�y���I����ЏV�����������ڶ�N�ӷ����У��ň��ӿ��ԟo��ʽ���_�ٿv�{�C���ˣ���׃�ⲿ�ň��ݶȺͷ������{�C����ʩ���������أ��M��ʹ������������܉�E�\�ӡ�
�������ڣ��Ї��ƌW���g��W���̿ƌW�WԺ�{���̌�����������{�ƽY�������Ч�ӹ��{�C���˼��会����ֲ������ˎ���\ݔ����ȡ����Ҫ�Mչ������ͨ�^���{�ƵĜu�������M�Іδο����ع�����S���g����ӹ���Ӿ�������c�b�d؛�����������Ŀ��Ĺ��κ��F�������Y����������ԓ�Y���M���ɼ������w����ֲ������ˎ���\ݔ�ί��[��������
���P�ɹ��քe��“Conical Hollow Microhelices with Superior Swimming Capabilities for Targeted Cargo Delivery”��“Targeted Single-Cell Therapeutics with Magnetic Tubular Micromotor by One-Step Exposure of Structured Femtosecond Optical Vortices”���}�l����Advanced Materials��Advanced Functional Materials [Adv. Mater., 31, 1808226, 2019; Adv. Funct. Mater., 29, 1905745, 2019]��
�D1 �{�����S�u������ӹ����Ĺܠ��c�F�������Y��
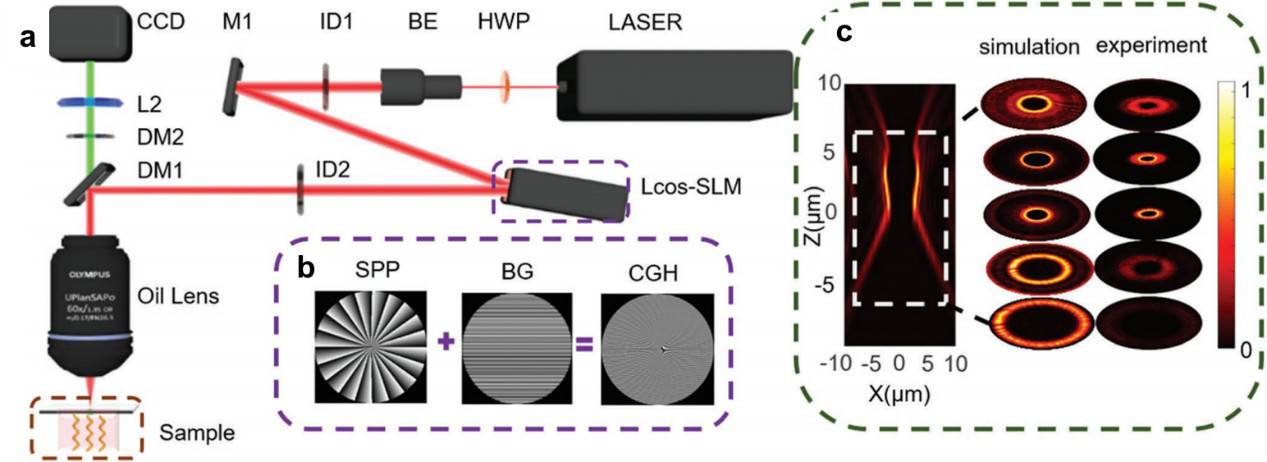
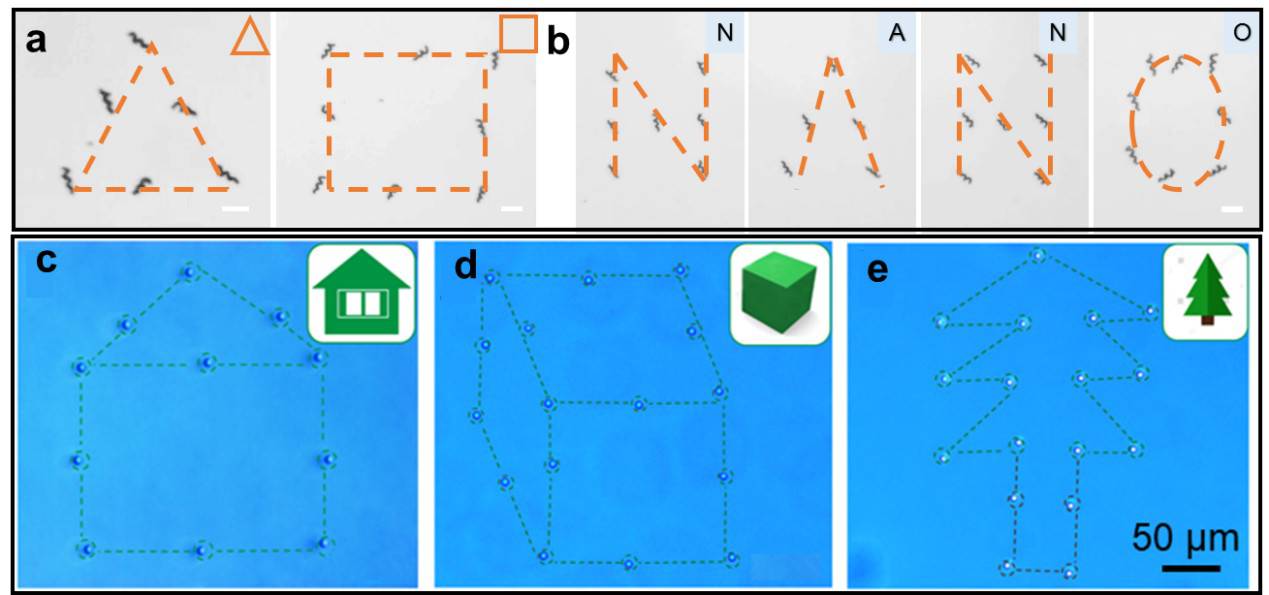
���������������У��о��ˆT�OӋ����������λ��Ϣ�Ĺ��ȫϢ�D����������d�ڿ��g���{��������ϣ��{�Ƴ������S�u����������ڸ�Ч�ӹ����Ĺܠ���F�������Y��������ڂ��y�ļ���ֱ���ӹ���DLW��������ӹ��ٶ���������600��������֮�⣬����ԓ����Ҳ�����`��ɿصؼӹ�����ͬ�����Ĺܠ��c�����Y����KUKA�C���˾S�����������ˏ��s���S�Y���ļӹ�������

�D2 �F�ο��������ӹ��c�ň���
������Σ�������D2��ʾ���F�ο��������Y�������������������푑����ϡ��������д�����S��ķ��Ɲ��Ȧ����ϵ�y���{��ݔ���������λ��Ϣ�����S���g���γ����D�ň����ň�����ĸ�׃ʹ���ԽY���ܵ����������ã��M�������Ч�ӡ������Ȱl�F�F����������ڂ��y��ֱ�����Y�����и����ǰ�M�ٶȣ�����Ч�����˙M��Ư���\�ӡ�
�D3 �ň����_�ӿ����F�������c�ܠ�Y��
��������֮�⣬���ôň��ݶȺͷ����׃��������Ч����Y���ľ��_�������F�����������D�ň�����ɸ��N���s�D����܉�E�\�ӣ���D3��ʾ�������Ĺܠ�Y�����ݶȴň������SiO2����b�d���\ݔ�������cጷš�
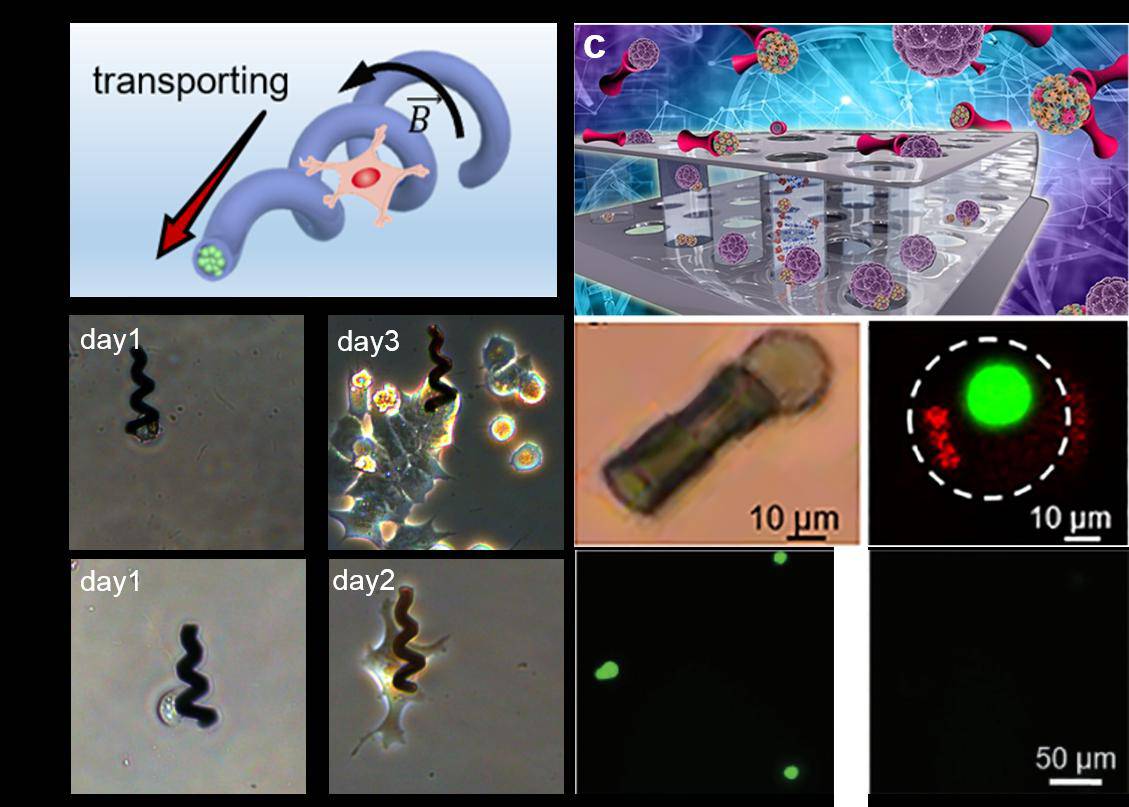
�D4 ���������c�ܠ�Y���քe�����ɼ�����ֲ�c����ˎ���\ݔ�ί��[��
��������о��ˆT�����F�ο��������Y���Ȳ��c�ⲿ�քe�b�d�{����؛������w��������ɼ�������ֲ�����ù��b�Y���b�d�\ݔˎ�DOX������������Hela���M����Ч�ί�����ͨ�^�ɹ���C�ί�Ч�����@Щ��������˺��η����Ŀ��Ĺܠ�F������늙C�ӹ��ٿv���g���ڼ�����ֲ���w��ˎ���\ݔ���o�����g���I�������Ҫ����ǰ�����쿨�C�����������P�����t���I���ṩ���µļ��g�ֶΡ�
�������̿ƌW�WԺ��ʿ��������������Փ�ĵĵ�һ���ߣ��ǖ|���ںͺ��������ڞ�Փ�ĵĹ�ͬͨӍ���ߡ��@헹����õ��ˇ�����Ȼ�ƌW�����ش�x�����Ї��ƌWԺ�ͿƼ������c�аlӋ����֧�֡�
����Փ��朽ӣ�
����https://onlinelibrary.wiley.com/doi/full/10.1002/adma.201808226
����https://onlinelibrary.wiley.com/doi/full/10.1002/adfm.201905745
���C���˾S��