
ƷTM12,14 ������")


����Stewartƽ�_�������еĴȡ��߾��Ⱥ��d�����رȵ����c���m���ڸ߾��ȡ����d���Ҍ��������g��Ҫ�������^С�Ĉ��ϡ����S���I(l��ng)��õ��ˏV������(y��ng)�����ɞ��C�����Լ��t(y��)���O(sh��)�䡢�Cе�ӹ������ăx���ȶ�N��(y��ng)���I(l��ng)����о����c֮һ��
����Stewartƽ�_�C��(g��u)��1965���������W(xu��)��Stewart�״Ό��������w��ģ�M���C��(g��u)������ġ�1978�꣬�Ĵ������W(xu��)��Hunt�����Stewartƽ�_��(y��ng)�������I(y��)�C�������γ�һ�N6���ɶȵ�������(li��n)�C������1979�꣬KUKA�C����ʾ�����S����D.T.Phma��MCcallion��Stewartƽ�_��(y��ng)���ڙC����ȡ�óɹ������^�IJ�(li��n)�C�����Q���ˡ��S�����P(gu��n)�о��ɹ�����ӿ�F(xi��n)��Stewart�C��(g��u)�ɹ���(y��ng)���ڴ����b��C���ˡ����ЙC���ˡ��C��������ȡ�
����1989�꣬3���ɶȵ�DELTA��(li��n)�C��(g��u)�Q�������ƽ�_����ƽ�����oƽ�_�ġ����^�ģ�1990��HEXA�Y(ji��)��(g��u)�Q�����@�ǿɌ��F(xi��n)���S���g��(n��i)����λ�˶�λ��6���ɶȿ��g��(li��n)�C��(g��u);1993�꣬���������Ԅӻ��c�C�����о�Ժ���Ƴ������㊡�ĥ���@���S������������ȶ�N�ӹ��Ķ�ܲ�(li��n)�ӹ��Cе�֣��@��һ����־���D(zhu��n)�ۡ�
����1994����Stewartƽ�_�l(f��)չ�����ٷ��s��һ�꣬Ӣ��Geodectic��˾��֥�Ӹ繤�ߙCչչ��HEXAPOD���S�ӹ��C������Gidding&Lewis��˾Ҳͬ�rչ��Variax���S���ߙC������Ingersoll㊴���˾����ʿGeodectics��˾��չ����Stewart��(sh��)�ؙC����Ʒ������Stewartƽ�_�C��(g��u)�ڙCе�ӹ����I(y��)�����룬�e����Ŀ������������о��C��(g��u)����I(y��)�_ʼ����Ͷ��Stewart�C�����о��c�_�l(f��)���S�Y(ji��)��(g��u)��(chu��ng)�º���Փ�о��ɹ�����ӿ�F(xi��n)��
����������(n��i)Stewartƽ�_�mȻ�ڸ�У�о��n�}���l�����F(xi��n)����������Ʒ�����M��һֱ�^�龏����Ŀǰ���a(ch��n)�C���ˏS�̶��]���܌����D(zhu��n)������Ʒ������I(y��)���͑�(chu��ng)�쌍�H�rֵ�������ر����Կ͑��鱾������Ӵ��аl(f��)Ͷ�룬��Stewartƽ�_��Ʒ����·���~���ˈԌ���һ����Ŀǰ���a(ch��n)��(li��n)�C���˶���3�S��3+1�S��(li��n)�C���˞������쿨�C���˺η�늙C�S�����䔵(sh��)�W(xu��)ģ�͞�DELTA�Cе�֣�ģ���ڳ����^�磬�����漰���ļ��g(sh��)�y�cҲ�^�麆�Σ�DELTA�C�������õ��������\�ӌW(xu��)���������֪�R��ƽ����c���Ǻ���(sh��)���Ǹ���֪�R�D(zhu��n)�������a(ch��n)���������w�F(xi��n)����Stewartƽ�_��6�S��(li��n)�C���˵������\�ӌW(xu��)�t�^���(f��)�s���]��һ�����Ќ�������(sh��)�W(xu��)���ďS�������Stewartƽ�_��������ƌ�(d��o)߀����һ���y�ȵģ��F(xi��n)�ھͿ������䵽���y��ʲô�ط���

����6�S��(li��n)�C���˵����^���ԣ��L���c���y(t��ng)3�SDELTA�C���˴�ͬС�������Džs�������|(zh��)�Եą^(q��)�e��DELTA�C�����Г���3�����ӱۣ���ÿһ�����ӱ��c��ƽ�_��ͨ�^2���U��朽ӣ���2�U���ܪ����\�ӣ�ֻ��һͬ���S���ӱ��\�ӣ���Stewartƽ�_��6�����ӱۣ�ÿ�����ӱ�ͨ�^һ���U���c��ƽ�_朽ӣ�KUKA�C���˾S��������朽ӗU�������Ԫ����\�ӣ��mȻ���߶���6���U��朽����ӱ��c��ƽ�_�������\���΄ݵ���ȫ��һ�ӵġ�
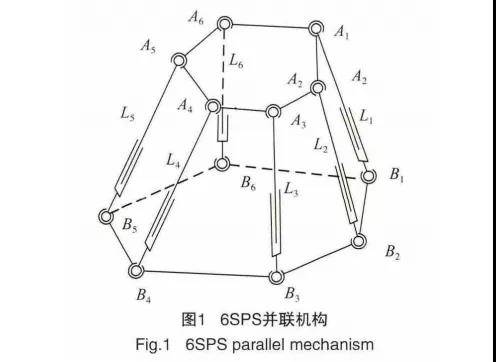
�������S��(li��n)�C��(g��u)��D1��ʾ��6�����S����(sh��)��ƽ�_�q�Ai��6�����S����(sh��)��ƽ�_�q�Bi��6����(li��n)�(q��)���L��Li������42헎΅���(sh��)Xj����ƽ�_��λ��gj���R�����˾�ꇱ�ʾ��j��ʾָ��̖��j=1,2,…,m��ʾm�Mָ�
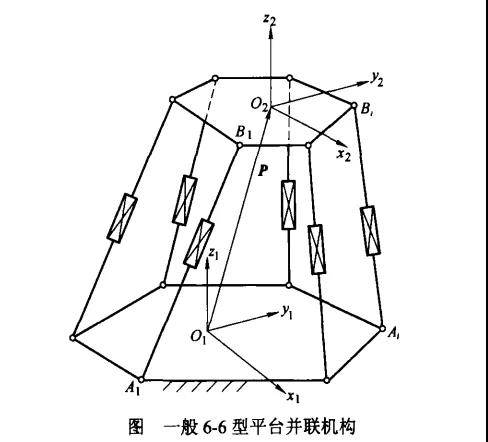
�������ϡ���ƽ�_�q�����ƽ����ȡ�cO2��O1��ԭ�c���Sz2��z1�քe��ֱ���ϡ���ƽ�_���քe�����c�ϡ���ƽ�_�̶��B�ӵĄ�����ϵO2x2y2z2��������ϵO1x1y1z1��ֻҪ�����������ϵO2x2y2z2��������ϵO1x1y1z1�����D(zhu��n)׃�Q���R��ƽ��ʸ��P���Ϳ��Դ_�����gλ�ˡ�
�����O(sh��)�cAi�ڶ�����ϵO1x1y1z1�е����˞�Qai(axi,ayi,0),������ϵԭ�cO2�ڶ�����ϵO1x1y1z1�е����˞�P(x,y,z)���cBi������ϵO2x2y2z2�е����˞�Qbi(bxi,byi,0),AiBi���L�Ȟ�Li,������ϵO2x2y2z2��������ϵO1x1y1z1�����D(zhu��n)׃�Q��ꇞ�
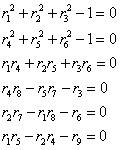
�����ɗU�L�s���l����
����i=1,2,...,6
������������ֵ��
����i=1,2,...,6
�����������D(zhu��n)׃�Q���R���λ����ꇣ���
�����F(xi��n)�ڿ�����ʽ�_����ͨ�^����(sh��)��Ԫ����K�õ�6�w�ŷ�늙C�D(zhu��n)���c��ƽ�_��6�����ɶȣ�x,y,z,A,B,C����һһ����(y��ng)�P(gu��n)ϵ�����P(gu��n)���P(gu��n)���a�Ͳ�һһ�����ˡ�
�������S��(li��n)�C���ˣ�Stewartƽ�_�����鲢(li��n)�C���ˮa(ch��n)Ʒ���㷨���(f��)�s��һ�N�����y��ֻ��Ƭ�Z����������еĊW�ء��������������(n��i)Ψһһ���������S��(li��n)�C���ˣ�Stewartƽ�_�㷨���Ĺ��I(y��)�C���˹�˾�����a(ch��n)Ʒ�аl(f��)���鼺�Σ���“��׃�Ї����I(y��)�C���ˬF(xi��n)��”����ģ�������ꐳ��£�Ŭ�����F(xi��n)���������Ї������I(y��)4.0�r����