
���C(j��)�����®a(ch��n)ƷTM12,14 ������")
��KUKA�C(j��)�����\(y��n)�еķ�ʽ����Щ")
�����ŷ�늙C(j��)���a����(b��o)���S")
�����S���҇�(gu��)��(j��ng)��(j��)��Ѹ�����������(gu��)��(j��ng)��(j��)�ĵڶ���֧���a(ch��n)�I(y��)��ʳƷ���I(y��)�ĬF(xi��n)����ˮƽ�ѳɞ鷴ӳ���������|(zh��)���ߵͼ���(gu��)�Ұl(f��)չ�̶ȵ���Ҫ��(bi��o)־��ʳƷ�ӹ��I(l��ng)��Ŀ��ٰl(f��)չ���o��I(y��)����O�������(zh��n)���S�����M(f��i)ˮƽ����ߡ����M(f��i)���������࣬Խ��Խ�����M(f��i)�߸����P(gu��n)עʳƷ��Ʒ�|(zh��)�Ͷ����ԡ���ˣ��Ă��y(t��ng)���ֹ��ڄ�(d��ng)������ʽ�����н�Ó��������(sh��)�F(xi��n)ʳƷ���a(ch��n)�ęC(j��)е�����Ԅ�(d��ng)�������I(y��)����Ҏ(gu��)ģ��������l(w��i)����ȫ�����a(ch��n)Ч�ʣ�����I(y��)�ڼ��ҵ��Ј�(ch��ng)��(j��ng)��(zh��ng)�н����L(zh��ng)�ðl(f��)չ��ȥ����Ҫ�D(zhu��n)׃��
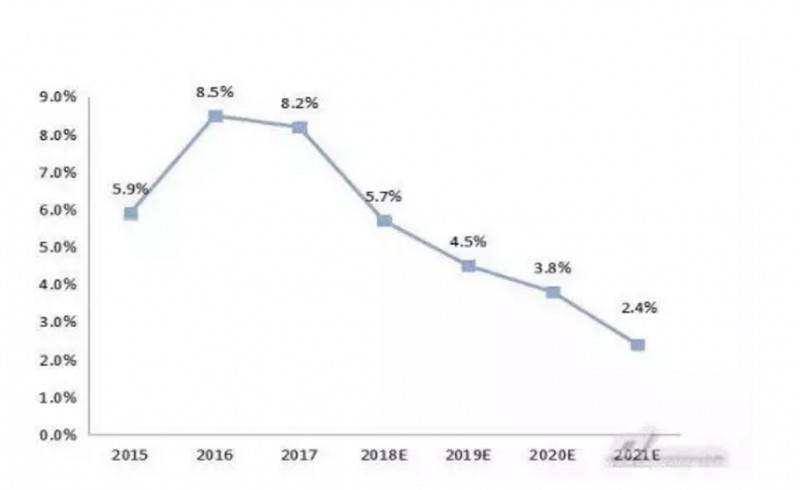
2015��-2021��ʳƷ����ИI(y��)Ͷ�YҎ(gu��)ģ���A(y��)�y(c��)����λ:�ك|����ţ�
����Ŀǰ��ʳƷ�ИI(y��)��ԭ�ϼӹ��h(hu��n)��(ji��)�ķǘ�(bi��o)�O(sh��)��ǰ���Ԅ�(d��ng)���̶Ȼ������ƣ���ĩ�˰��b�h(hu��n)��(ji��)�����ڮa(ch��n)Ʒ��(g��)�Ի������ӻ��ɞ��Ј�(ch��ng)����څ��(sh��)���ǘ�(bi��o)�O(sh��)�������̶����a(ch��n)��ģʽ�џo���M�����a(ch��n)�����Ի������������(li��n)�C(j��)��������ռ����eС���ٶȹ�(ji��)�Ŀ죬���Ի��ߵ����c(di��n)��ʳƷĩ�˰��b���b��/�b�С��֒������ϡ��D(zhu��n)���ȹ�ˇ�ϴ�����(y��ng)����

���������ظ���(j��)�͑�(sh��)�H�����ڱ��w��չ�������棬��(sh��)�F(xi��n)���(d��ng)ֱ����400mm~2600mmȫ���w���ڹ�(ji��)���ٶȷ��棬�������͑����a(ch��n)Ч�ʞ���l(f��)�c(di��n)��������(y��u)�����w�������аl(f��)�ı��wPhantom-1200���ٶȹ�(ji��)���_(d��)��500��/min�������،�(du��)ʳƷ�ИI(y��)���L(zh��ng)���P(gu��n)ע���Y(ji��)�Ͽ͑�(sh��)�H���o��ҷ����������P(gu��n)��(y��ng)�ð�����
������Ʒ��ɿ�������(li��n)�C(j��)�������Ի��b��
�����ɿ����b�д����Ȼ�����˹����Ԅ�(d��ng)�b�ЙC(j��)�M(j��n)�в������˹������߂�һ�����Ի������L(zh��ng)�r(sh��)�g�������o�����C���a(ch��n)Ч�ʵķ�(w��n)���ԡ��Ԅ�(d��ng)�b�ЙC(j��)Ч�ʷ�(w��n)�������o���M��a(ch��n)��ƷĶ��ӻ�����ˣ��������ṩ�����Ի���Q���������H�������a(ch��n)Ч�ʣ����Ҍ�(sh��)�F(xi��n)�˶�Ʒa(ch��n)Ʒͬһ�l�a(ch��n)�����p�ٓQ����ֱ�ӽ��ͮa(ch��n)���ɱ�����͑����a(ch��n)ʡ�r(sh��)ʡ�أ�����Ч���ͬ�r(sh��)��(sh��)�F(xi��n)��(chu��ng)�ա�
�����a(ch��n)�����Ϟ�3�N��ͬ�Π���ɫ���ɿ��������Д[�����бP�У�����ͬ�N�Π�ͬ�N�ɫ��һ�У����Ͻ�(j��ng)ҕ�Xϵ�y(t��ng)�M(j��n)�ж�λ���R(sh��)�e���C(j��)��������(j��)��Ϣ����ץȡ��������бP��(du��)��(y��ng)λ�ã����I(y��)�C(j��)�����S����ʰ�Ź�(ji��)�Ğ�68��(g��)/��犣��鱣�CʳƷ��ȫ���C(j��)����ĩ���e���ʳƷ��(j��)ץ�֣������^���l(w��i)������ȫ��
�������ɿ����b��ҕ�l��
�������������a(ch��n)���y(t��ng)�I�������ܻ��ٿ�
����ĩ�˰��b�h(hu��n)��(ji��)�����ڮa(ch��n)Ʒ��(sh��)���������I(y��)�C(j��)���˾S������Ҫ���_(t��i)�C(j��)���˅f(xi��)�������r(sh��)���C(j��)����֮�g��“���Ĭ��”���@�ø�����Ҫ���������аl(f��)�Ļ���ҕ�X�Ķ��C(j��)�����΄�(w��)�����㷨,ʹ��ҕ�Xϵ�y(t��ng)ͨ�^�ֲ��^��@ȡ�h(hu��n)����Ϣ,�ɠ�B(t��i)�D(zhu��n)�Ʒ����x���΄�(w��)��(zh��)��,��(sh��)�F(xi��n)�ľֲ���ȫ�ֵ�ᘌ�(du��)���C(j��)����ϵ�y(t��ng)�ąf(xi��)�{(di��o)���䡣

������(d��ng)�y(t��ng)�I����ϵ�y(t��ng)����f(xi��)����ij�_(t��i)�C(j��)���˰l(f��)�����Ϻ��΄�(w��)�����㷨��(hu��)��ԓ�C(j��)���˵��΄�(w��)�Ԅ�(d��ng)���������������C(j��)���˵�ץȡ�΄�(w��)�У��Ա���������ץȡЧ�ʣ���(d��ng)���ϙC(j��)���˻֏�(f��)�����������C(j��)���˕�(hu��)���΄�(w��)�Ԅ�(d��ng)�����ԭ���ϙC(j��)�������^�m(x��)�M(j��n)��ץȡ�΄�(w��)��
������(d��ng)ҕ�X�z�y(c��)�������^���ܼ��r(sh��)���y(t��ng)�I����ϵ�y(t��ng)��(hu��)�Ԅ�(d��ng)���͂��͎��ٶȣ����C�C(j��)���˵�����ץȡЧ�ʣ���(d��ng)ҕ�X�z�y(c��)�����^��ϡ��r(sh��)�����͎��ٶȄt��(hu��)�Ԅ�(d��ng)��ߣ����_(d��)��ץȡҪ�y(t��ng)�I���������d��BeMotion�\(y��n)��(d��ng)��������֧��Scara/Delta/Stewartƽ�_(t��i)/��(li��n)���S�șC(j��)����ģ��,��ˣ��ɏV����(y��ng)���ڶ�N��(y��ng)�È�(ch��ng)����
�������y(t��ng)�I����ҕ�l��
���������S���˿ڼt������ʧ���ڄ�(d��ng)���Լ���Դ�����a(ch��n)Ҫ�r(ji��)����m(x��)��������I(y��)�鷀(w��n)�����a(ch��n)�ɱ���������a(ch��n)Ч�ʣ��C(j��)���˾S�����Ԅ�(d��ng)�����a(ch��n)���Dz������D(zhu��n)�Ĵ�څ��(sh��)��������“��͑�֮����”���Լ��g(sh��)�аl(f��)���Ȍ�(d��o)������̽���C(j��)���˽Y(ji��)��(g��u)�����ƺ�ҕ�X�㷨�ă�(y��u)���c��(chu��ng)�·����������͑��ṩ��(y��u)�|(zh��)�ķ���(w��)��