�_Դ��һ��(g��)����C(j��)����")
���a��C(j��)����KR40�ֳ־�������")
���C(j��)����KR280�ŷ�늙C(j��)�^(gu��)���(b��o)")
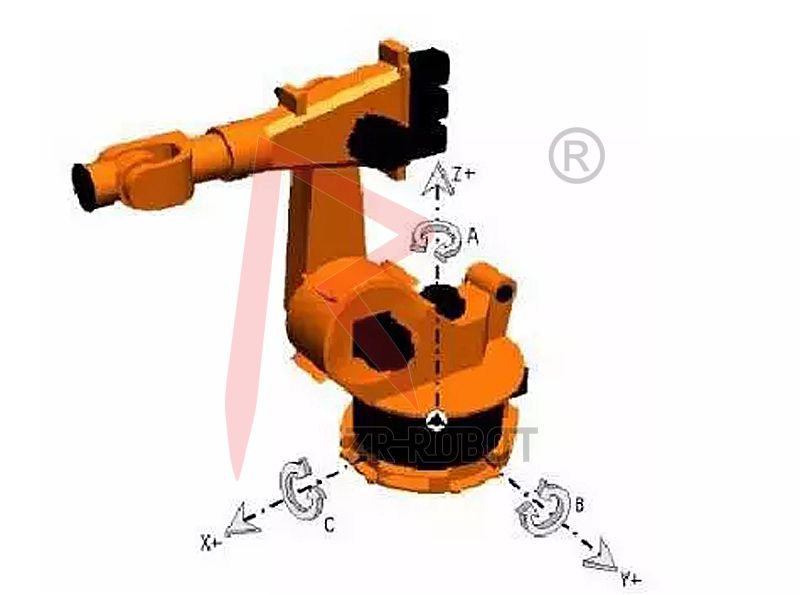
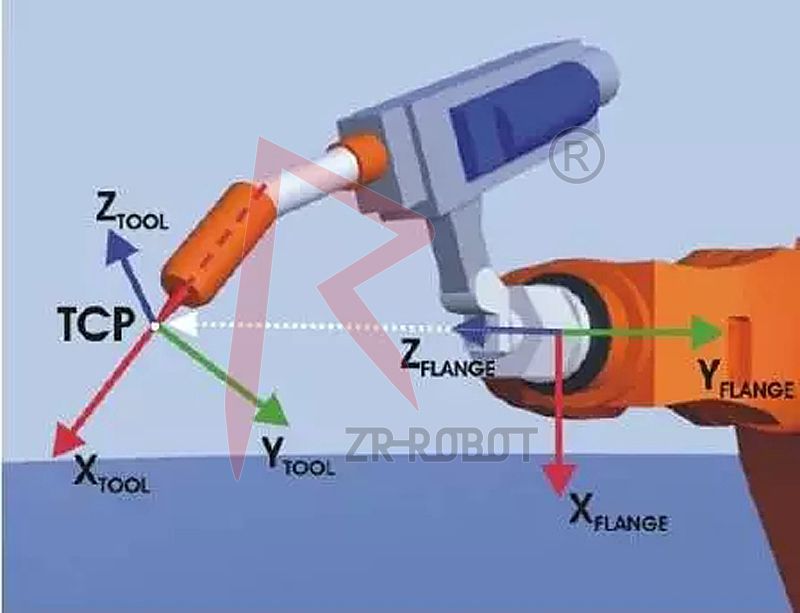
��������(bi��o)ϵ���������(bi��o)ϵ��
*��������(bi��o)ϵ��һ��(g��)�̶����x�ĵѿ�������(bi��o)ϵ��������ROBROOT����(bi��o)ϵ�ͻ��A(ch��)����(bi��o)ϵ��ԭ�c(di��n)����(bi��o)ϵ��
*��Ĭ�J(r��n)�����У���������(bi��o)ϵλ�ڙC(j��)�����㲿��
ROBROOT���P(gu��n)��(ji��)����(bi��o)ϵ��
*ROBROOT����(bi��o)ϵ��һ��(g��)�ѿ�������(bi��o)ϵ���̶�λ�ڙC(j��)�����㲿�������Ը���(j��)��������(bi��o)ϵ�f(shu��)���C(j��)���˵�λ��;
*��Ĭ�J(r��n)�����У�ROBROOT����(bi��o)ϵ�c��������(bi��o)ϵ��һ�µġ���$ROBROOT���Զ��x�C(j��)��������(du��)����������(bi��o)ϵ���Ƅ�(d��ng)��
��������(bi��o)
*���A(ch��)����(bi��o)ϵ��һ��(g��)�ѿ�������(bi��o)ϵ���Á�(l��i)�f(shu��)��������λ�á�������������(bi��o)ϵλ���ջ���(zh��n);
*��Ĭ�J(r��n)�����У����A(ch��)����(bi��o)ϵ�c��������(bi��o)ϵ��һ�µġ����Ñ������빤����
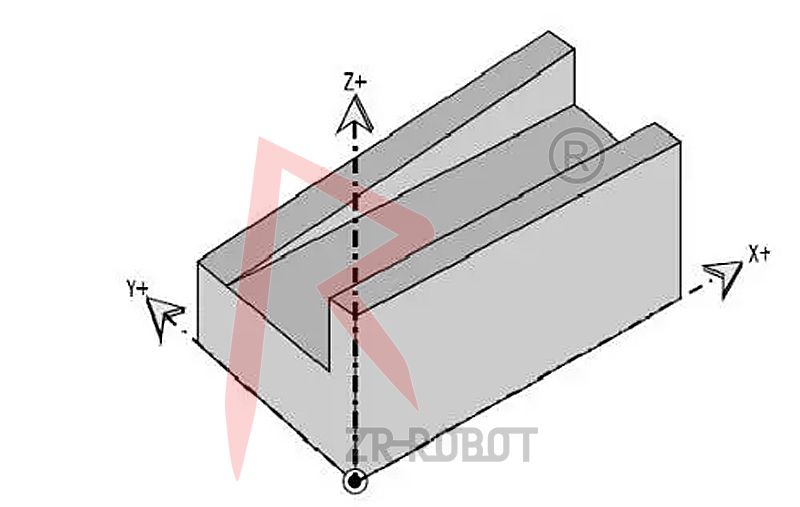
��������(bi��o)
*��������(bi��o)ϵ��һ��(g��)�ѿ�������(bi��o)ϵ��λ�ڹ��ߵĹ����c(di��n)�У�
*��Ĭ�J(r��n)�����У���������(bi��o)ϵ��ԭ�c(di��n)�ڷ��m�����c(di��n)�ϣ�������Q�����m����(bi��o)ϵ������������(bi��o)ϵ���Ñ����빤�ߵĹ����c(di��n)��
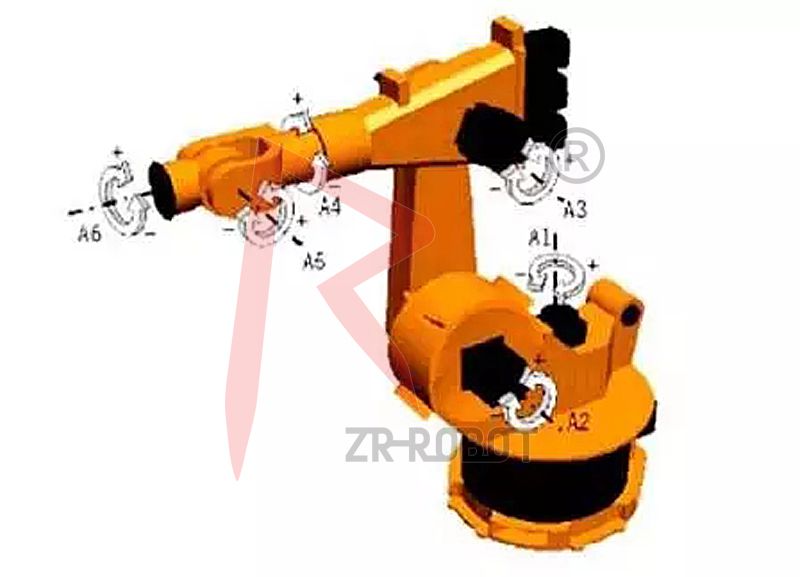
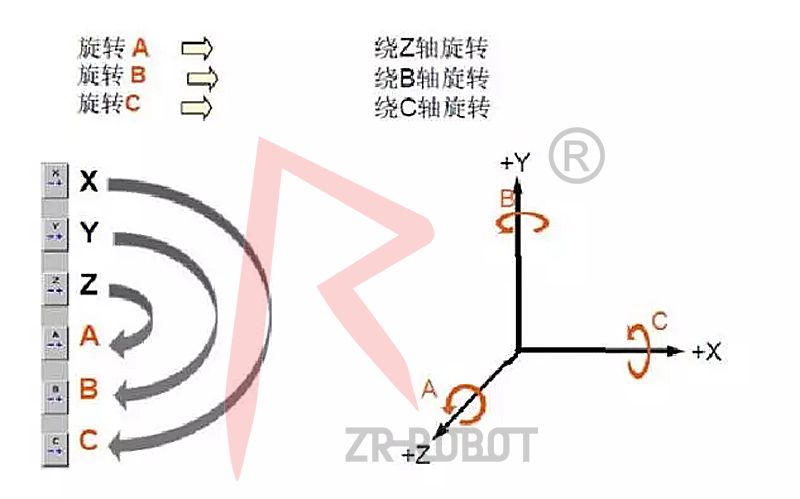
����(bi��o)ϵ֮�g���D(zhu��n)�P(gu��n)ϵ
�ļ�����
1���½�����
�f(shu��)�����ڑ�(y��ng)���ˆT�Ñ��M�в����x��ģ�塣��Ĭ�J(r��n)����һ��(g��)“ģ�K”��͵ij���
�������E��
��1����Ŀ䛽Y(ji��)��(g��u)���x��Ҫ�����н���������ļ��A�������ļ��A�����������е��ļ��A�ж��ܽ�������
��2�������½���
��3���H�����ڌ����Ñ��M�У������x��ģ�匢�Ԅ�(d��ng)���_���x������ģ�岢��OK�_�J(r��n)��
��4��ݔ��������Q�����c(di��n)��OK�_�J(r��n)��
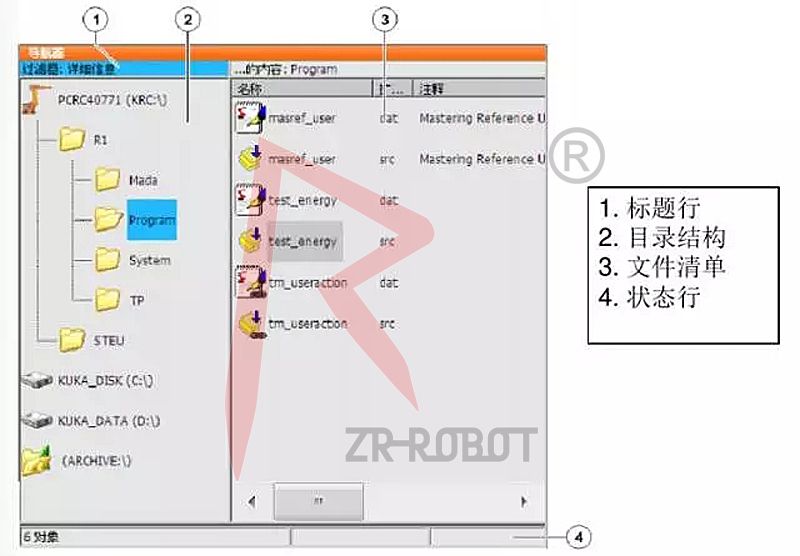
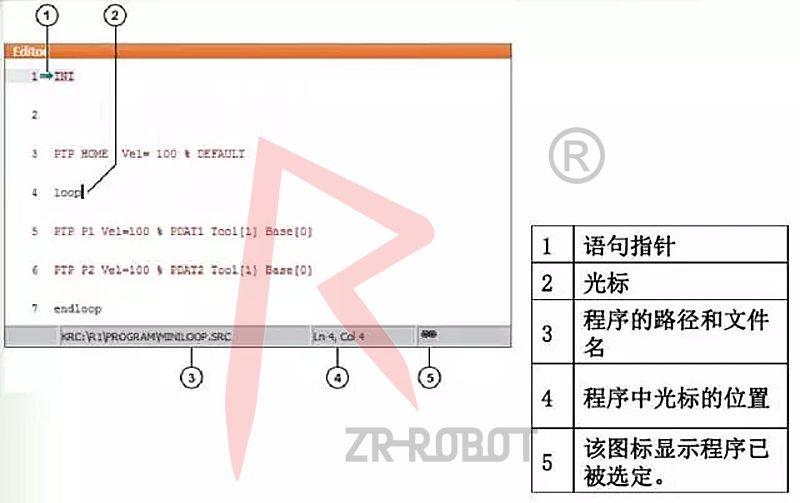
�������
�x�����_����
�����x�����_һ��(g��)����֮���@ʾһ��(g��)�����ͳ������nj�(d��o)������
�������x����
��1���Z(y��)��ָᘌ����@ʾ��
��2��������Ԇ���(d��ng)��
��3���������،�(du��)�����M(j��n)�о����x���ij��������m���ڑ�(y��ng)���ˆT�Ñ��M�M(j��n)�о�����r��
���磺�����Sʹ�ö��е�KRLָ��
��4����ȡ���x��r(sh��)���o(w��)��ش�ȫ�ᆖ(w��n)���ɑ�(y��ng)�ø��ġ������(du��)�����S�ĸ����M(j��n)���˾��̣��t��(hu��)�@ʾ��һ�t������Ϣ��
�����Ѵ��_��
��1�������܆���(d��ng)��
��2��������Ծ������_�ij��������m���ڌ����Ñ��M�M(j��n)�о�����r��
��3���P(gu��n)�]�r(sh��)��(hu��)����һ��(g��)��ȫԃ��(w��n)�����ԑ�(y��ng)�û�ȡ�����ġ�