���C(j��)�����®a(ch��n)ƷTM12,14 ������")
�����\(y��n)�еķ�ʽ����Щ")
�����ŷ�늙C(j��)���a����(b��o)���S")
ᘌ��F(xi��n)�����I(y��)���ٶ�׃�Լ��������L�ď�(f��)�s��Ҫ�����I(y��)�C(j��)�������HҪ�M(j��n)�и�Ч��������Ҫ�M��������I(y��)����׃�������Ի����a(ch��n)����2019�겪���،�����ʾ��ϵ�y(t��ng)���C(j��)�������w������Ը��M(j��n)����������I(y��)�ڱ��w�����ϵı���ԣ�����I(y��)����Ͷ�a(ch��n)�ṩ�������Ը�Ч���ͳɱ��ă�(y��u)�ݞ��҇������ИI(y��)���D(zhu��n)���������u���ߡ�
�τ�ʾ�̺�����(li��n)ʾ���·�ʽ
ʾ��ϵ�y(t��ng)����_����(li��n)�C(j��)�����\(y��n)��܉�E��λ�ˡ��\(y��n)���ٶȵ���Ҫ�{(di��o)ԇ�h(hu��n)��(ji��)֮һ�����C(j��)���˵����a(ch��n)�\(y��n)�Ӷ��a(ch��n)�����ܴ��Ӱ푡�ʾ�̲�����Ҫ�Ծ����ˆT���ֳ�ʾ�����Ͼ����C(j��)����λ�ˡ��\(y��n)��܉�E���\(y��n)���ٶȼ����ٶȁ����Ʊ��w������
���y(t��ng)��ʾ�̷�ʽ��Ҫ��ه��ʾ���ˆT�����C(j��)�����\(y��n)�г����@�ӵ�ʾ�̷�ʽ���ȴ��ڼ��g(sh��)�y�ȣ�ֻ�о����ˆT���ܜ�(zh��n)�_�ľ��������P(gu��n)��(sh��)��(j��)����Σ��H�{��(sh��)��(j��)�Ɯy�����ھ��������\(y��n)��܉�E����ƫ�����r����Ҫ����(f��)���ģ��ڌ�(sh��)�H������ռ�ô����r(sh��)�g����(f��)�s�ҵ�Ч�ʵęC(j��)���{(di��o)ԇ���͑�Ͷ�a(ch��n)���ɱ�����Ӱ푡�
�����ڴ˭h(hu��n)�����τ�ʾ������ǰ�صĿƼ������c�����Եõ����Ј��ďV���P(gu��n)ע�c�J(r��n)�ɡ��τ�ʾ��ͨ�^�����ˆT�ֳ֠����C(j��)���ˣ�ӛ�ʾ���^�̵�λ�˔�(sh��)��(j��)����əC(j��)�����̡��ڹ�(ji��)ʡ����Ӗ(x��n)�;��̵ĕr(sh��)�g����������a(ch��n)Ч�ʵ�ͬ�r(sh��)��Ҳ��һ���̶�������˿͑���I(y��)�����a(ch��n)Ч�ʡ�����(li��n)�C(j��)���˵��τ�ʾ���Ќ���ǰ�ؼ��g(sh��)���˴β����ز��������ȹ��P(gu��n)��11����ʽͨ�^�τ�ʾ���ڲ�(li��n)�C(j��)�����ϵă�(n��i)���yԇ�������������ڲ�(li��n)�C(j��)���˱��w�{(di��o)ԇ����ʽ���á�

�ش˴�ԇ�(y��n)��ʽ���ǻ������ؿ��Ƶ�����ƽ���τ�ʾ�̣��������C(j��)���˵Ą����W(xu��)ģ�ͣ����������Ԍ�(sh��)�r(sh��)������C(j��)���˱��τӕr(sh��)����Ҫ�����أ�Ȼ����ṩԓ���ؽo늙C(j��)ʹ�ÙC(j��)�����܉�ܺõ��o�������ˆT�M(j��n)���τӡ�
���ص�Ӌ(j��)�������й�ʽ��ʾ��
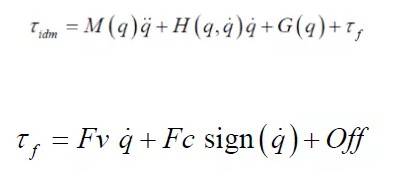
��ʽ�е���ͨ�^������W(xu��)��õ�늙C(j��)����Ҫ�����أ�KUKA�C(j��)���˾S������Ӌ(j��)�㹫ʽ�����T�����(xi��ng)������W���� ���x�����(xi��ng)�������(xi��ng)�Լ�Ħ�����(xi��ng)������(d��ng)�еĸ���(j��)�x���Ħ����ģ�Ϳ��Էֽ��ճ��Ħ�����(xi��ng)�����Ħ�����(xi��ng)�Լ��a(b��)����
��ͬ�ڂ��y(t��ng)�迹���τ�ʾ�̷������������Ʒ�����ʾ�̕r(sh��)�������_�Ą����W(xu��)ģ�ͣ��τәC(j��)���˵�Ħ�����Լ��T�������ĵ�������(y��ng)��늙C(j��)���صĵ�����ʹ�ÙC(j��)�����܉��p�ɵ��τӣ��������߸��Ѻá�ͬ�r(sh��)�㷨Ҳ���C�ˮ�(d��ng)���������N�r(sh��)���C(j��)�����܉�Ѹ�ٵ��oֹ�ڮ�(d��ng)ǰλ�ã��_�����O(sh��)��Ͳ����ˆT�İ�ȫ�����������τ�ʾ�̵���һ��(g��)��(y��u)���ǣ��ڄ����W(xu��)ģ���У����P(gu��n)��(ji��)�������ǿ��ԆΪ�(d��)���Ƶģ����ԙC(j��)���˵��τ��c(di��n)���ٱ��̶���ĩ�ˈ�(zh��)�����ϣ�KUKA�C(j��)����ʾ�����S���������߿����ڙC(j��)��������λ��ȥ�τәC(j��)���ˣ�ʹ���������`���׃��
�o��ʾ�������i����ʾ���·�ʽ
���鲢(li��n)�C(j��)�����^�m(x��)�l(f��)չ�c��(chu��ng)�µ�һ��(g��)��Ҫ���棬�τ�ʾ�̵���(y��ng)�����鲢(li��n)�C(j��)�����{(di��o)ԇ���g(sh��)څ�����ڿ��١�����ķ���l(f��)չ��KUKA�C(j��)����ʾ�����S�����M�����a(ch��n)��I(y��)��(y��ng)�ÙC(j��)�����M(j��n)�м��r(sh��)����Ч�����a(ch��n)�����������I(y��)�C(j��)���˸����m��(y��ng)�F(xi��n)�����I(y��)���ٶ�׃�����c(di��n)���Լ��M������I(y��)�������L�ď�(f��)�s��Ҫ������ʾ��ϵ�y(t��ng)�ЙC(j��)���˵Ŀ��ƺ��IJ�����ʾ����ͬ����ʾ�̭h(hu��n)��(ji��)ռ��(j��)��Ҫ��λ�����Դ˴β����س�����ʾ�̲�����ʽ�ĸ��M(j��n)֮�⣬߀����2019����ʽ�Ƴ��¿�o��ʾ������
���I(y��)�C(j��)����ʾ������Ҫ�Á�ע�Ժʹ惦�C(j��)е�\(y��n)�ӻ�̎��ӛ�����C(j��)���˰��տ������ٿv��·�����ߣ������f���ǿ��ƙC(j��)�����\(y��n)�ӵķ���P������C(j��)���˵��քӲٿv������������(sh��)�����Լ��O(ji��n)���õ���Ҫ�ֳ��b�ã�ʾ�����ڹ��I(y��)�C(j��)���˵����a(ch��n)��(y��ng)������ʮ����Ҫ�����á�

���y(t��ng)��ʾ�̲�����Ҫ��ʾ��������|���cҪ�M(j��n)�в����ęC(j��)����늚�����B�ӣ�֮���ɾ����ˆT��������������|��朽ӵ�һ��һ���ԣ�ͨ��һ�_ʾ����ֻ�ܲ��������B�Ć�һ���w���������_�C(j��)����Ҫ�B�Ӷಿʾ���������ɶ��_�C(j��)���˽M�ɵ��Ԅӻ��a(ch��n)���Юa(ch��n)���^�߳ɱ���������|���c�����L�ڵ��Ħ����Ҳ�����늾�ĥ�p����·�Ȇ��}����늾��������װl(f��)���p�@���}��Ӱ푙C(j��)�����{(di��o)ԇ��
�������ؼ����Ƴ����¿�o��ʾ������ͨ�^CE/UL/TUV���H�J(r��n)�C�����ßo��������̖��Q�˸߳ɱ���|�����c��վƥ���PLC��Y(ji��)�ϣ�ͨ�^�o��ͨӍ��(sh��)�r(sh��)���C(j��)�����\(y��n)���^�̺�ϵ�y(t��ng)�����M(j��n)�о��̣���(sh��)�F(xi��n)ʾ�̾��̡���(sh��)��(j��)�ɼ����ք�/�Ԅӿ��ơ�ͬ�r(sh��)Ҳ�܌�(sh��)�r(sh��)�@ʾ���ęC(j��)���˵Ĺ�����B(t��i)��������(sh��)���M(j��n)�п�ҕ���������\�ࡣ�`���ݣ����m��(y��ng)���I(y��)���a(ch��n)�����Ի���(y��ng)�úͿ��ٲ������Ҫ������ͨ�^����ͨӍ����ֹͬ�h(hu��n)���ж�����ϵ�y(t��ng)����ɔ_���Բ�ͬ�Č���(y��ng)��̖���κ͔�(sh��)�_�C(j��)���˱��w�M(j��n)�Пo���B�ӣ���(sh��)�F(xi��n)����һ����ĺ���������
500��/��犸߹�(ji��)�����(li��n)�ИI(y��)���ٶ�
�F(xi��n)��(sh��)���a(ch��n)����������͑��đ�(y��ng)�÷�����ͬ�������Ǯa(ch��n)Ʒ���������ڶ̵đ�(y��ng)�È��������C(j��)���˵����Ի���(y��ng)�úͲ������������˸���Ҫ�˴β�������ʾ��ϵ�y(t��ng)�е�ʾ���·�ʽ�аl(f��)��ʾ������Ʒ�Ƴ������鹤�I(y��)�C(j��)�����{(di��o)ԇϵ�y(t��ng)څ����١�����ķ���l(f��)չ�����挦����I(y��)�����D(zhu��n)�������ѳɞ��څ�ݵĮ�(d��ng)�£��C(j��)���˱��w��I(y��)���D(zhu��n)�ʹ�����վ���ĸ������Ǟ�͑��Ј�̽������Ч�����߾��ȵĽ�Q������