



����MIT�ƌW�҈F��OӋ��һ�N����3D��ӡ�Ĵ���ܛ�w�C������KUKA�C����ʾ�����S����ͨ�^һ���Α��ֱ������ܿ���ԓ�C����“��”“�L”“��”�����N���ܿ���ͨ�^���́팍�F��������մ�ӡ��3D��ӡ���ՏS�Ҿ́��o��ҽ�B��
������������
�����܉⡢�ᡢ��M��푑��������S���M���Π��׃��ܛ�w������ܛ�w�C���ˡ�������������Լ������tˎ���I���ЏV�����������e�Ǵň��܉����Ҫ���h�̷��]���g���Ƶ������tˎ�I���ṩһ�N��ȫ��Ч�IJٿط�ʽ��
���������c
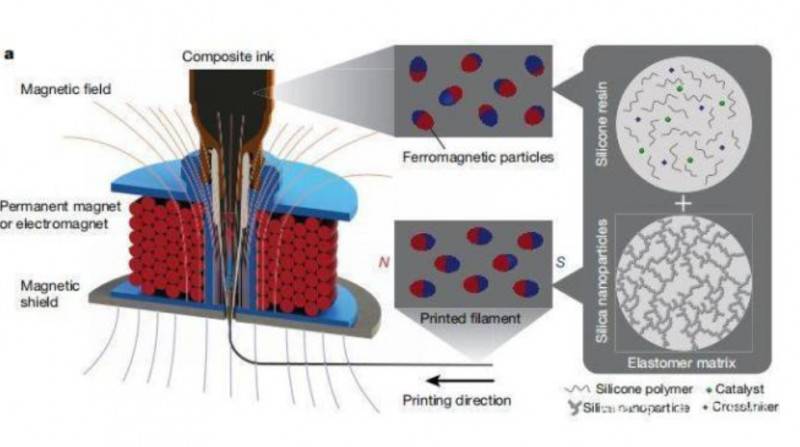
�D1��3D��ӡ���^�OӋ
����ԓ�F�ʹ����һ�N����Ĵ�ӡīˮ���ɿɴŻ����F�S��Ͻ����͚����������{�����ӽM�ɡ��ڹ��֬�еĚ������������һ�N��׃���Ԅ��T���a��īˮ������������W���ܣ��@���C��īˮ�����ͨ�^����͌ӌӶѯB��ͬ�r�ڴ�ӡ���^̎ʩ�Ӵň����@���҂��Ϳ������ôň��{�����ӵķ������������ň������Ų������Ķ����F�D������
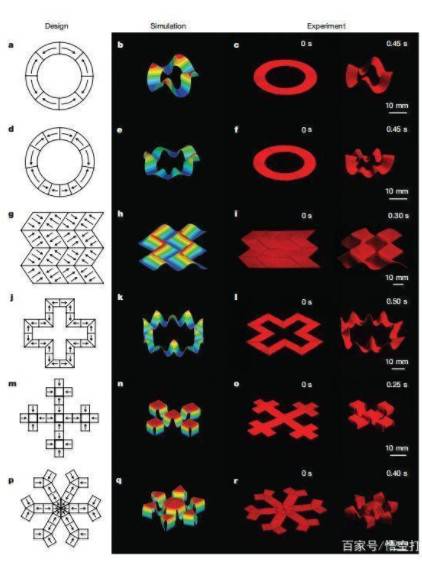
�D2��ģ�ͽ���
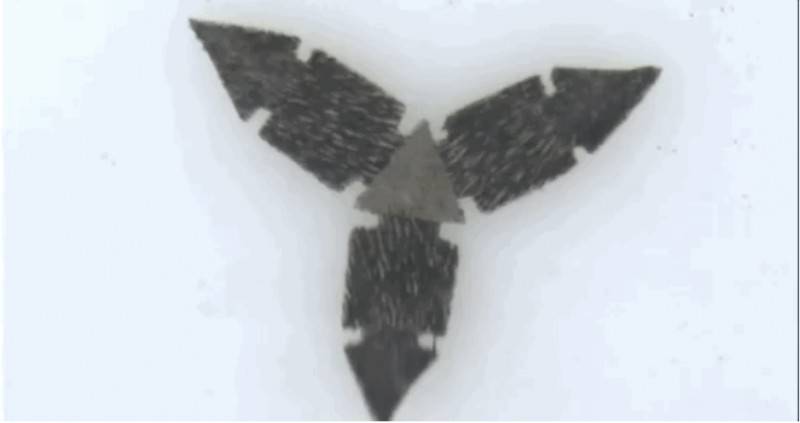
����ԓ�F�����һ��ģ�́��A�y���^���̵��F�Ů��ڴň��µ�3D��ӡ�ĽY��׃����ͨ�^������ģ��ָ���������OӋ��һ�N�Cе�����ϣ������ڑ��÷����ȣ���0.5s�ȿ����տs�����ň����_���������ܻ؏�ԭ��@�����ôň��ӣ��쿨�C���������S�����ͱ�����ֱ�ӽ��|����Ҫ��
www.twshmhelmet.com��3D��ӡ���Ց���Խ��Խ�V��" src="http://www.twshmhelmet.com/uploads/allimg/200113/1F11O301_0.jpg" />
�D��������ʾ��D
�������u�����@�N3D��ӡ�Ĵ���ܛ�w������0.1s-0.5s�ȑ�׃ˮƽ��0.15-0.25���ṩ�Ĺ����ܶȷ�����22.3kwm-3-309.3kwm-3,�h�h���^�ˬF�е�3D��ӡ���Π�ɸ�׃�IJ��ϡ�
����δ��չ��
��������������3D��ӡ����������һ������ƽ�_�������ƏV����N�ͺ���īʹ�ò�ͬ��͵ď����w��ˮ���z���|�ʹ����w������δ�����������Π�ɾ���ܛ���ϵ��OӋ���������������µ��OӋ����-�Ů��D���Ż����Ⱥ��ӈ��������@�N���ڴň��ğo���`�����s�Ϳ��ٵ��Π��Ƅ�ܛ���ϵ��b���ӣ�����������ӡ������t�W�O����I��đ����ṩ���µĿ����ԡ�
�������Ͼ�����մ�ӡ��3D��ӡģ�͞��ҽ�B�����P3D��ӡܛ�w�C���ˣ�3D��ӡ���Ց���Խ��Խ�V�Ľ�B��ϣ�����Խo����ṩ������