



�������g������P�㡢�䎛�����o

����һֻ�Z¹����ѩ���ϵ�Anna������Kristoffһ���ܣ��@�ǵ�˹����ܺ��u�ĄӮ��Ӱ����ѩ�澉���зdz����ʵ�һĻ�����I���������������^��ѩ�}�}��ɭ�֣�Kristoff��ѩ���ϵ�������Ⱥ���������_����������������һ�zѩ��
�����I��ӰƬ����Ȼ����ܛ��ѩ���|�пɲ���һ���������顣��ˣ���ʿ����Ո���˼��ݴ�W��ɼ����У��ʿ�W�W��Teran��Craig Schroeder���룬�_�l��һ�N���ڲ����c�����㷨����ģ�Mѩ�ı��F��
������2007���ԁ�һֱ���ε�ʿ�����Teran�͈F��M����һϵ���о����l�FĿǰ��Ӌ��C�D�ΌW�Є���ѩ�ĺ�ģ�Ͳ������ڡ�
����֮���о��ˆT�J�����|�c�������m���ؽ�ѩ����������_�l���P��ԓ������Փ�ĺ�ҕ�l������ȥ����Ӌ��C�D�ΌW���hSiggraph��չʾ��
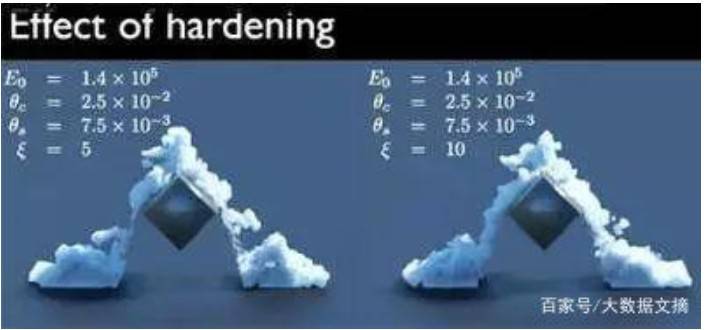
����“ѩ�ķ����c�������ϲ�ͬ��”Teran�f��“����㉺ѩ������׃�ø�Ӳ�����ǣ��쿨�C�����������������������׃�������ѡ��҂��������@Щ�����]�ڃȡ�”
����Stomakhin�f�������“Matterhorn”�H����ģ�M�ׂ������еķeѩ�������㷨��������˱����ѩ����˹��ˇ�g����K�ںܶ�������ʹ��������������������ģ�M�۹���
�������F�ڣ��@�N���g��MIT�Á�ʹ�ã��п����_�lһֻ��ܛ���C������
��������ܛ�w�C����
�����ᵽ�C���ˣ����ܴ��˕��뵽�Cе���⚤�������Ӱ������ꑑ�ꠡ��д�ɐ۟o�������w�o�҂������˺���̵�ӡ��
������ô��KUKA�C����ʾ�����S�����Л]�����^�Լ��OӋһ�������ǷN���|�ġ��������������ܛ�w�C�����أ�
���������µ�Փ���У�������ʡ�����WԺӋ��C�ƌW�c�˹����܌���ң�CSAIL���ĈF��_�l��һ�N����C�����OӋ������ģ�M�����@�Nģ�M���Ñ������OӋ���N���ܵ�ܛ�w�C���˳ɞ���ܣ������ѽ��C�������Ա����ģ�M�����ЙC���˵������ܲ��C���˵ȸ��N�C�����OӋ��
������Փ�ĵĹ�ͬ���߰���Yuanming Hu��Spielberg���L���W��Jiancheng Liu����ʿ��Jiajun Wu�Լ���ʡ�����WԺ����Joshua B. Tenenbaum��William T. Freeman��Daniela Rus��Wojciech Matusik��
����Փ��朽ӣ�
����https://arxiv.org/pdf/1810.01054.pdf
���������҂�Ҳ�����OӋ�Լ���“���”�ˣ����˽��@��ܛ�wģ�M��֮ǰ�����S��ժ������һ�c�C�����OӋ���A��֪�R�ɡ�
�������Ǯ�����׃��ܛ�w���C����֮“��”���y�OӋ�ˡ�
�������漰�������Կ�׃�β����Ƴɵ�ܛ�w�C���˕r���@Щģ�M����Ч���Ͳ���ô���ˡ��@������׃�����w���漰���ĵ���������Ҫ���s�ö࣬��Ҫ������Ӌ����������ģ�M��
������ô�C��������ΰ��������Ը�����أ�
���������C�������£�Ӌ��C�ƌW�҂�ͨ��ʹ��һ�N���Q������ģ�M����ϵ�y����ӳ�C���˵��О錢���Ӱ푬F�����硣ģ�M�����H������Ч���u���C�����OӋЧ����߀�����ṩ���P��θ��M�OӋ�ķ�����
����“机�”�Q��
������ô���@���m�������Բ��|��ģ�M��ϵ�y����ô���F���أ�
����ģ�M��ϵ�y�ķ����ǻ���“�ʽ���t��the chain rule��”Ӌ��ģ���ˈF�Ҳ�Qԓģ�M����“机�ChainQueen��”���F��_�l��һ�Nԓģ�M���ĸ�����GPU���F�㷨��ϣ����K�����_Դ�����w�Ʌ��������ҕ�l��
����“机�”���õ��ǬF�еļ��g—���|�c����Material Point Method, MPM����ģ�M���w�����|���@헼��g�����������Ӱ����ѩ�澉���Ё턓�������ѩ�������w���f���쿨�C���˺η�늙C�S�����@����ģ�M��ʹ�õ���һ�N���ӿ��ٵ����|�c���������Ƅ���С���˷������|�c����Moving Least Squares-Material Point Method, MLS-MPM�������������Ը��ӟo�p�ؽY�ϵ����������ƺͅfͬ�OӋϵ�y�С���MLS-MPM��Փ�Ĺ�ͬ����Yuanming Hu�Լ������eϦ���၆��W�ͼ��ݴ�W��ɼ����У���о��ˆT��ͬ�_�l��
����ģ�M��ʹ�û����Ƅ���С���˷������|�c����MLS-MPM����ʹ��“����”���@��ζ�����Ԍ��C���˿��ƺ��OӋ�����І��}�M�������½����Č��������Ӌ�㡣ͬ�rҲ��ζ����ֵ������������Ч�������C���˵�������ã����ұ�����ğo���������������珊���W����Ч�ʸ��ߡ�
�������|�c��
�������|�c�������|�c�xɢ���υ^�� �ñ����W��Ӌ����g���������������̣������˾W���׃�͌����̎���� ����������պ͚W���㷨�ă��ݣ� ��Ҫ���ڛ_�����֏ء���ը�ȸ��١���׃�Ά��}����⡣
�������|�c�������Á������Ӱ����ѩ�澉���ı���ѩ���ʬF������������ݴ�W��ɼ����У��ʿ�W�W��Teran��Craig Schroeder��������������ʿ��ܛ�����̎�Alexey Stomakhin��Andrew Selle��Lawrence Chai�M�ɵĈFꠣ��_�l��һ�N���ڲ����c�����㷨���Ԅ���ѩ�ı��Fģ�M��
�����Ӯ��Ӱ“��ѩ�澉”�еĈ���չʾ�˼��ݴ�W��ɼ����У���W�����c��ʿ��ܛ�����̎�����ģ�Mѩ�ı��F�r��ȡ�õijɾ͡�

����ܛ�w�C���˺�ӛ
����“�҂������@��ϵ�y�п��ܴ�����ܛ�w�C���˵İlչ��”��ʿ��Andrew Spielberg�f��������IEEE���H�C�����c�Ԅӻ������International Conference on Robotics and Automation, ICRA���ϰl������Փ�ĵĹ�ͬ����֮һ��“�҂�߀������һ��TensorFlow�ӿڣ����S�����Ñ��_�l�Լ���ܛ�w�C����ϵ�y�����o���˽�ģ�M���ĵӼ�����”
����ԓ�ĿĿǰ��ע�ڏ����OӋ������Yuanming Hu��ʾ��δ���Ĺ�������ģ�M�������ϣ������ϡ����ϻ����w�������Ǹ��ӏ��s��ܛ�h���cӲ�h��֮�g������á�