



�����A����8��8�հl��ȫ��a�Iչ��GIV@2025����������������ڼ��ٶ������|�ֿɼ������A�y����2025�꣬���ܼ��g���B��ÿ���ˡ�ÿ����ͥ��ÿ���M����ȫ��58%���˿ڌ�������5G�W�j��14%�ļ�ͥ����“�C�����ܼ�”��97%�Ĵ���I����AI��
�����P�ߏ������ՙC�����аl���������Ԍ�ԓ�ИI��һ�����˽⡣�����쿴���A��l��2025��ʮ���A�y�ă��ݕr����һ�r�g�ڲ��T���M���˷������o��С��邃�O��Ĺ��衣�������I�C�����ͷ��ՙC�����б��^��IJ�����Ա��ăH�����ՙC�����M�н��x��
����ʮ���A�y���C����ռ���_20%
����ʮ���A�y�У������P�ڙC���˵��A�yռ���_��20%��
����څ��һ���ǙC�������Ǽ���
�����S�����ϿƌW����֪�˹������Լ�5G���ƵȾW�j���g�IJ����M���������F�o��C���ˡ������C���ˡ��罻�C���ˡ��ܼҙC���˵��ΑB�S���ęC���ˣ�ӿ�F�ڼ������������������I�����o����µ����ʽ��
����GIV�A�y��2025�꣬ȫ��14%�ļ�ͥ�������Լ��ęC���˹ܼҡ�
����څ�ݶ�������ҕҰ
������5G��AR/VR���C���W�����¼��gʹ�ܵij���ҕҰ���������҂�ͻ�ƿ��g�����r�g�ľ��ޣ�Ҋ��δҊ���x������µ�������
����GIV�A�y��2025�꣬����VR/AR���g����I�����L��10%��
����څ������������
�����������˹����ܼ����W���g���������猢���������О���������o�����o������ݵ������w���^ȥ��������Ϣ������Ϣ�����ҵ��㣻δ��������Ҫͨ�^�c�����o�����_����������Ρ���늡���܇���c�㌦Ԓ��
����GIV �A�y��2025�꣬���܂��˽K�����팢���w90%���˿ڡ�
����څ���ģ���“��”��·
�������ܽ�ͨϵ�y�������ˡ��{�T��܇�v�͵�·�B�ӵ��yһ�ĄӑB�W�j�У����ܸ���Ч��Ҏ����·�YԴ���s�̑���푑��r�g������µĽ�ͨ��̓�M����܇����Ҏ���ɞ���ܡ�
����GIV�A�y��2025�꣬C-V2X��Cellular Vehicle-to-Everything����C܇�W���g��Ƕ�뵽ȫ��15%��܇�v��
����څ�������˙C�f��
�������˹����ܡ���Ӌ��ȼ��g���ں�������������ȴ��Mδ�턓��������İlչ��ԇ�e�̈́��µijɱ����Խ��ͣ�ԭ����������I������Ա��ϣ������ƷҲ��C���o�������S����
����GIV�A�y��2025�꣬97%�Ĵ���I������AI��
����څ�ݰˣ���������
�����oՓ���ں�̎���Z���Ƿ���ͨ���Ļ��Ƿ����ƣ����ּ��g�c����������u��ƽ�_ģʽ��������и��I�V�����á�������I���ЙC�����_�ź����У�����ȫ�����B�YԴ�������߃rֵ�������̘Iģʽ��
����GIV �A�y��2025�꣬ȫ��������I����ʹ���Ƽ��g���������Ƽ��g�đ���ʹ���ʌ��_��85%��
����څ�ݾţ�5G�����ٶ���
���������͕r�ӡ��V�ӵ�����������5G�ļ������ã����B�����и��I�������҂������и���ص�����
����GIV�A�y��2025�꣬ȫ����650�f5G��վ��������28�|�Ñ���58%���˿ڌ�����5G���ա�
����څ��ʮ��ȫ��������
�����|���������磬�������µ������������A�����ȫ��ԓ�ӿ콨���yһ�Ĕ����˜ʡ�����ʹ��ԭ�t�����Ą��Ƅӽ��O�����������O�ܙC�����[˽����ȫ�c���µ���ģ��з�������
����GIV�A�y��2025�꣬ȫ����惦�����������_180ZB��
�����C�����漰�ļ��g
�������ڷ��ՙC���ˣ��漰���������Ć��}��
����1.�������
����2.��Ҫȥ���
����3.����ôȥ��
����ᘌ������������}���I������˲��ٵĽ�Q��������SLAM�����r��λ�c�؈D��������VSLAM��ҕ�X-���r��λ�c�؈D�������������������������}�Ļش𣬲��y���Y���C���˵Ļ������ܣ����D��ʾ��

����������ߙC�����OӋ���_�l��Ч�ʣ�����˹̹����W���˹����܌�����_Դ��һ�יC�����_�l��Robot Operating System���s����ROS��ROS��ϵ�y�ܘ�����Ħ��·��������Morgan Quigley���OӋ�������r߀������˹̹����W��ʿ�������IJ�ʿ�������Ї�֪���ȷdz��ߵąǶ��_��Andrew Ng����
����ROS�ɺ���ͨ�řC�ơ��_�l���ߡ����ù��ܺ����Bϵ�y�IJ��ֽM�ɡ�Ŀǰ��ROS��ROS2�ɂ��汾����ϵ�y�ܘ��^�e�飺
����������ߙC�����OӋ���_�l��Ч�ʣ�����˹̹����W���˹����܌�����_Դ��һ�יC�����_�l��Robot Operating System���s����ROS��ROS��ϵ�y�ܘ�����Ħ��·��������Morgan Quigley���OӋ�������r߀������˹̹����W��ʿ�������IJ�ʿ�������Ї�֪���ȷdz��ߵąǶ��_��Andrew Ng����
����ROS�ɺ���ͨ�řC�ơ��_�l���ߡ����ù��ܺ����Bϵ�y�IJ��ֽM�ɡ�Ŀǰ��ROS��ROS2�ɂ��汾����ϵ�y�ܘ��^�e�飺������ߙC�����OӋ���_�l��Ч�ʣ�����˹̹����W���˹����܌�����_Դ��һ�יC�����_�l��Robot Operating System���s����ROS��ROS��ϵ�y�ܘ�����Ħ��·��������Morgan Quigley���OӋ�������r߀������˹̹����W��ʿ�������IJ�ʿ�������Ї�֪���ȷdz��ߵąǶ��_��Andrew Ng����
����ROS�ɺ���ͨ�řC�ơ��_�l���ߡ����ù��ܺ����Bϵ�y�IJ��ֽM�ɡ�Ŀǰ��ROS��ROS2�ɂ��汾����ϵ�y�ܘ��^�e�飺
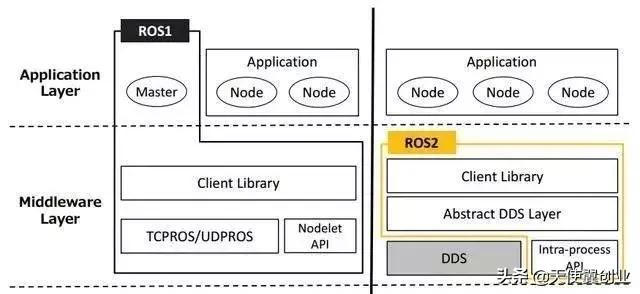
����������Ҫ�ą^�e����ͨ�řC�Ƶ�׃����ROS2������DDS�C�ƣ���Q��ROS���r�Ե�ȱ�ݣ�����@��ȱ�ݺ܇��أ������ڱ�ԍ���ܾá�