



1.����̫�W�����Pӛ����X�cKUKA���ƹ�PC��̫�W�ӿ����B
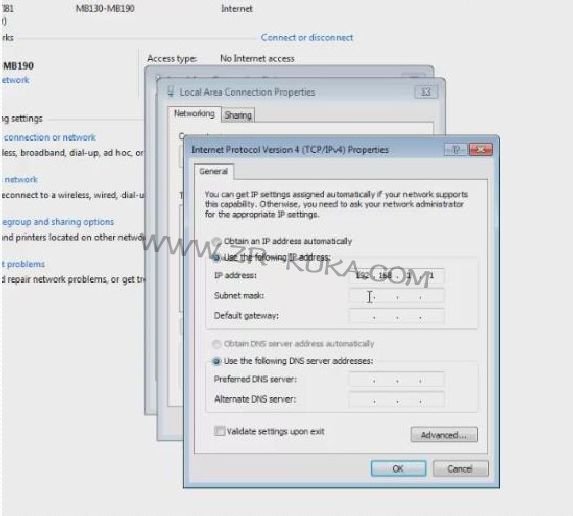
2.����X��IP�c�C���˵�IP�O�Þ�ͬһ̖��
3������Xϵ�y�Z�ԣ��O�Þ�Ӣ�ģ����Z��
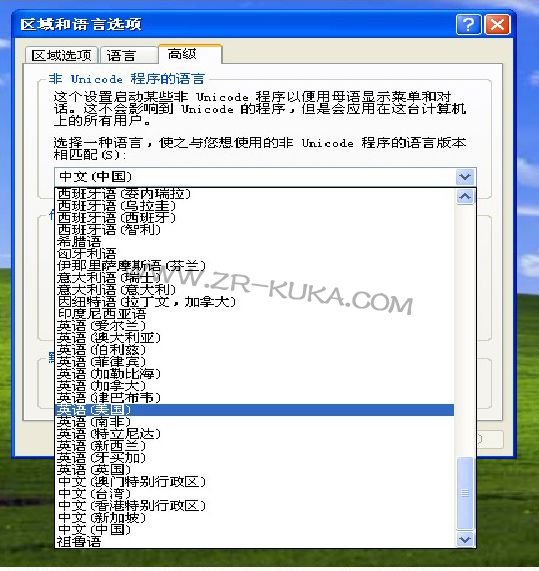
Workvisual3.0�����°汾��ϵ�y�\�Эh����횞�Ӣ�ģ���tܛ�����g�����e�����D

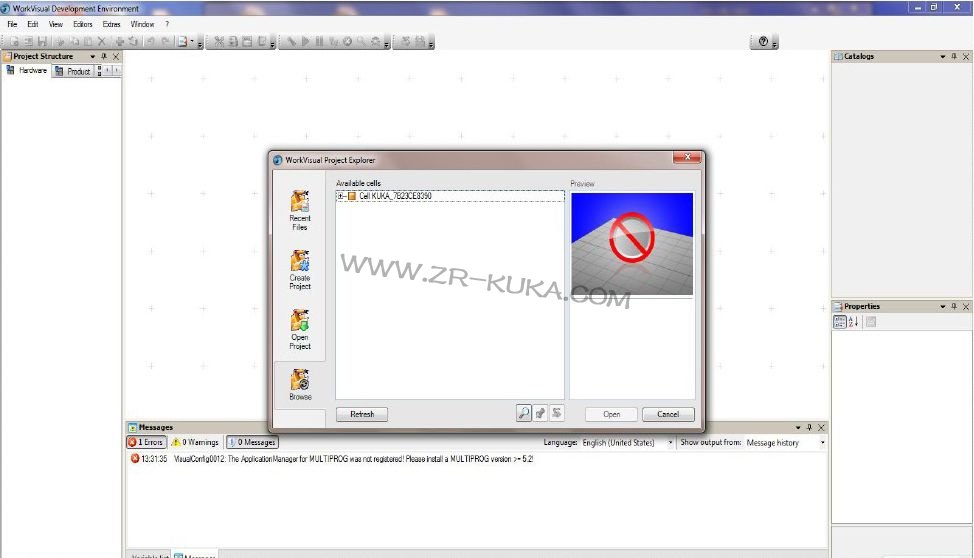
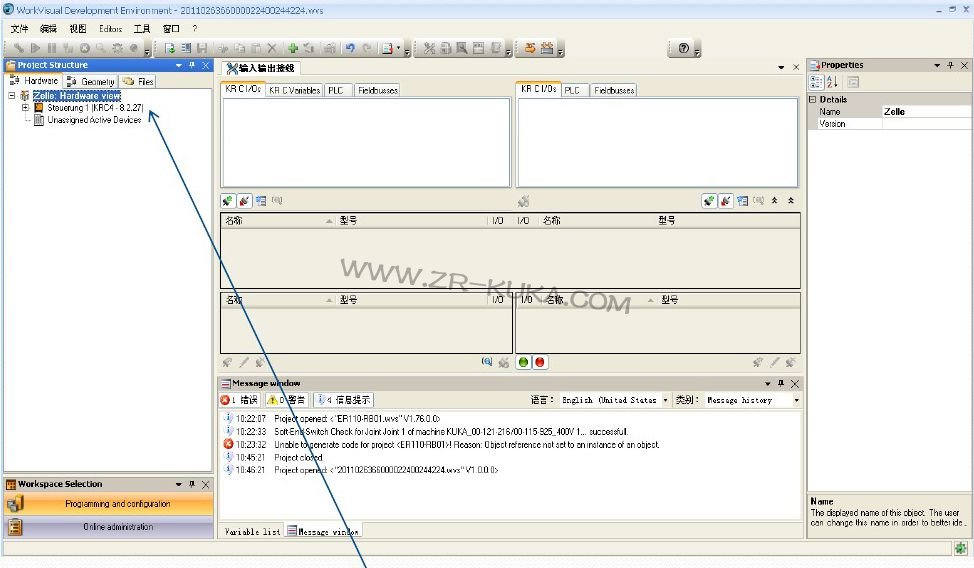
4.���_workvisual3.0.8ܛ�����x��BROWSE�x헣������KKA���Ŀ
5.���_�ۺϣ��x����x헣��p�����_�����Gɫ�^�ģ�
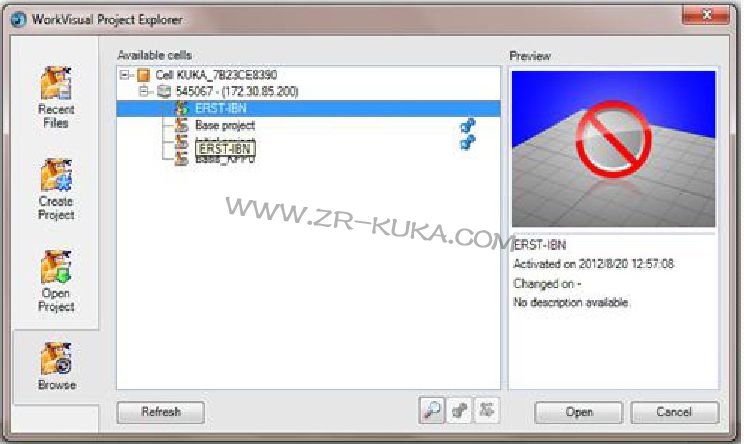
6.�����Ŀ�����әC���ˆ�Ԫ�M��
�p������C���˿��ƹ�
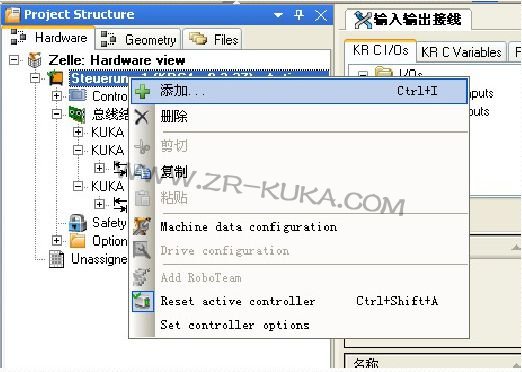
��˼��^����KUKA���ƹ��ϣ��ғ�����

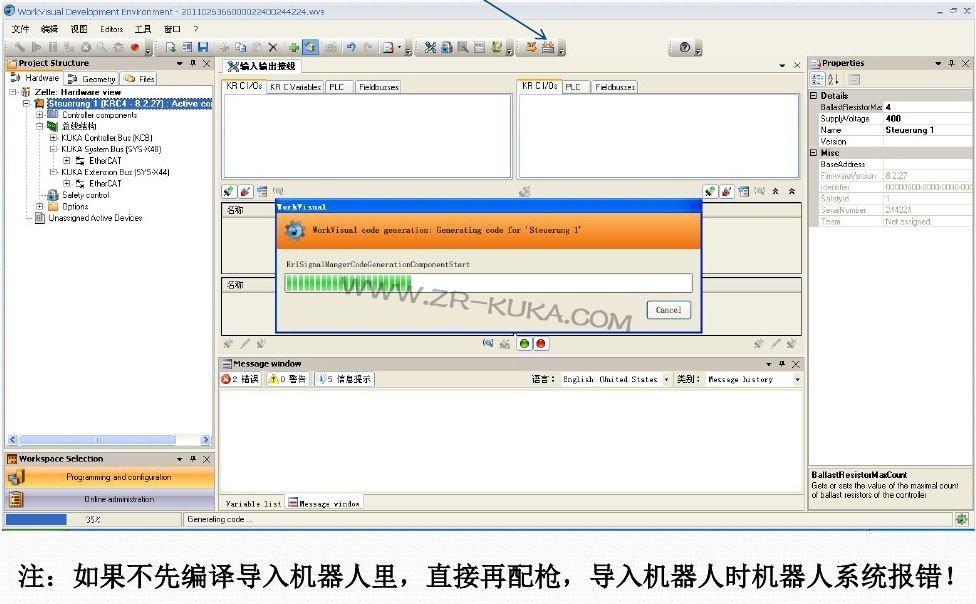
7���c���Ŀ���g��Ȼ�����C����
2.����X��IP�c�C���˵�IP�O�Þ�ͬһ̖��
3������Xϵ�y�Z�ԣ��O�Þ�Ӣ�ģ����Z��
Workvisual3.0�����°汾��ϵ�y�\�Эh����횞�Ӣ�ģ���tܛ�����g�����e�����D
4.���_workvisual3.0.8ܛ�����x��BROWSE�x헣������KKA���Ŀ
5.���_�ۺϣ��x����x헣��p�����_�����Gɫ�^�ģ�
6.�����Ŀ�����әC���ˆ�Ԫ�M��
�p������C���˿��ƹ�
��˼��^����KUKA���ƹ��ϣ��ғ�����
7���c���Ŀ���g��Ȼ�����C����
8.�����Ŀ�ęC�������x�������E�ԣ�
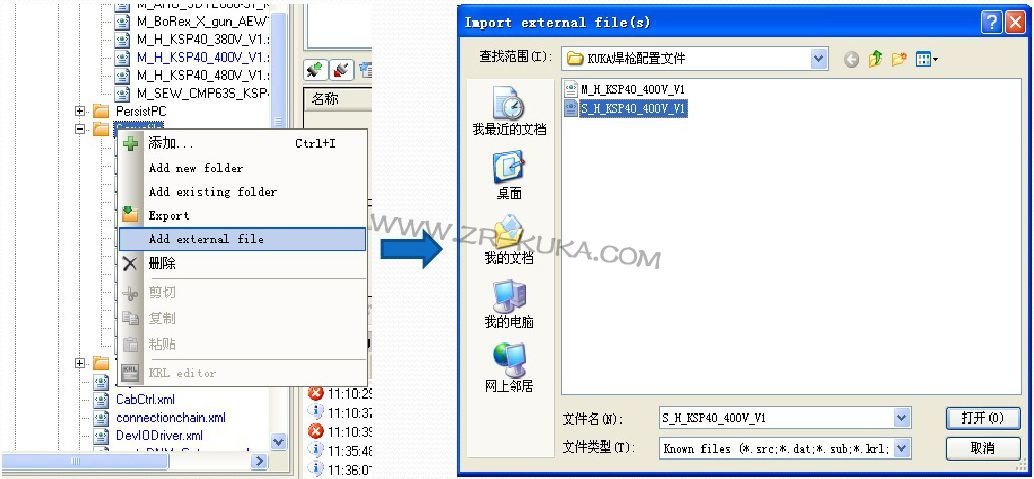
9.���Ӻ���afc�ļ�
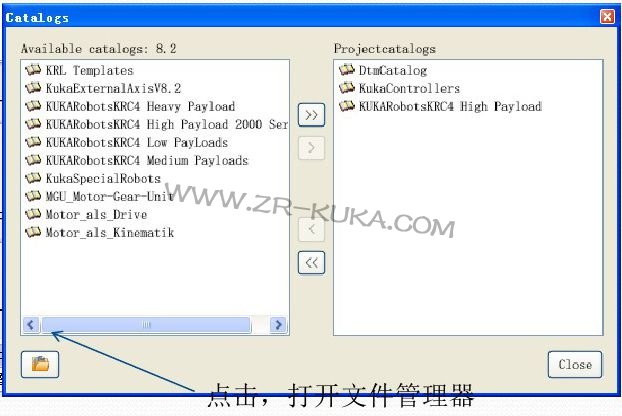
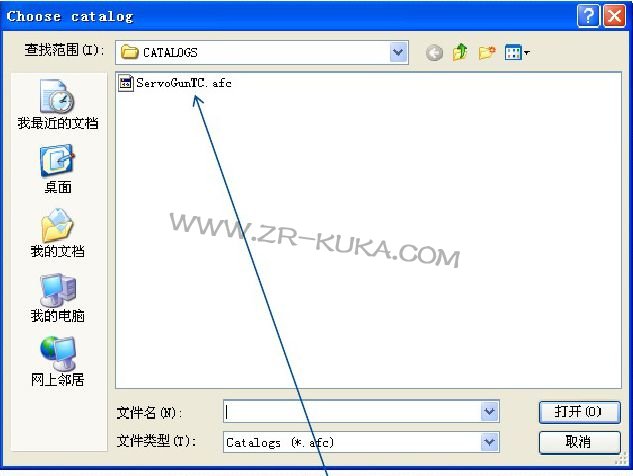
�x��֮ǰ�ʂ�õĺ��������ļ�.afc��ʽ

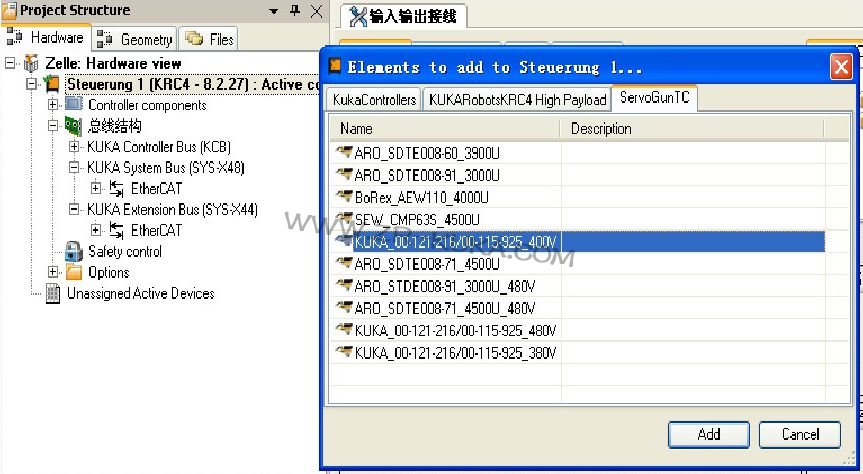
Ŀ䛱��У������F�������ӵ��ŷ������M��
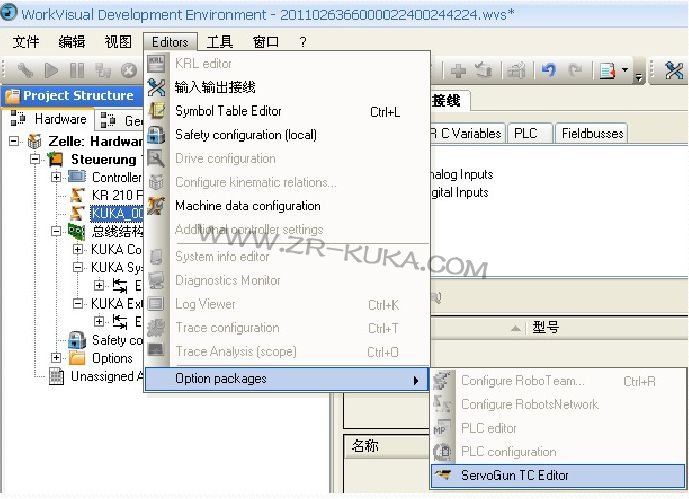
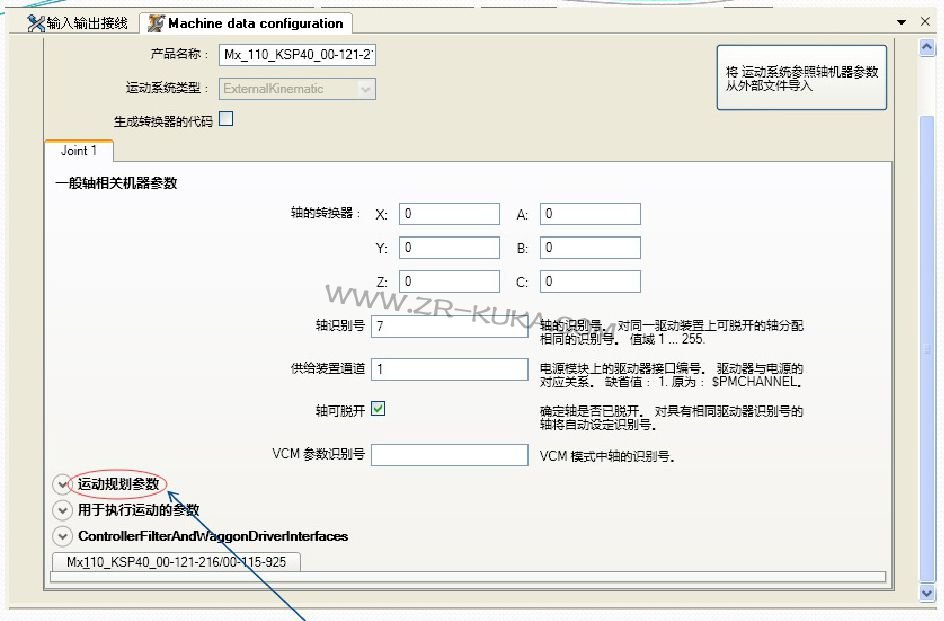
10.�x������늙C��̖
11.�νY���P
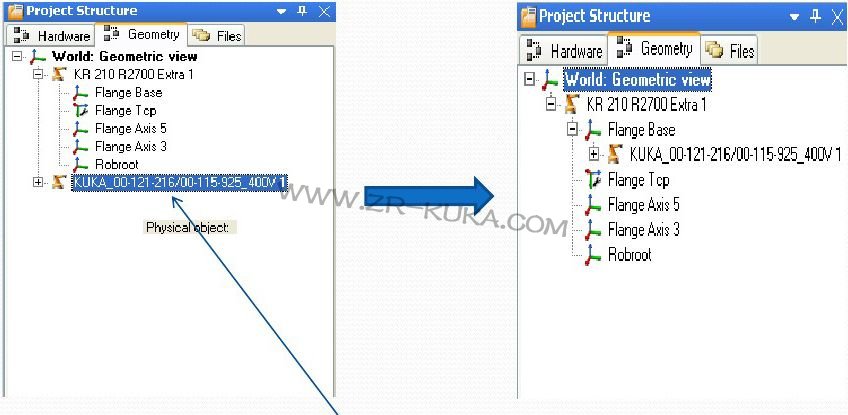
��ˌ�늙C��ϵ��C����Flange Base��
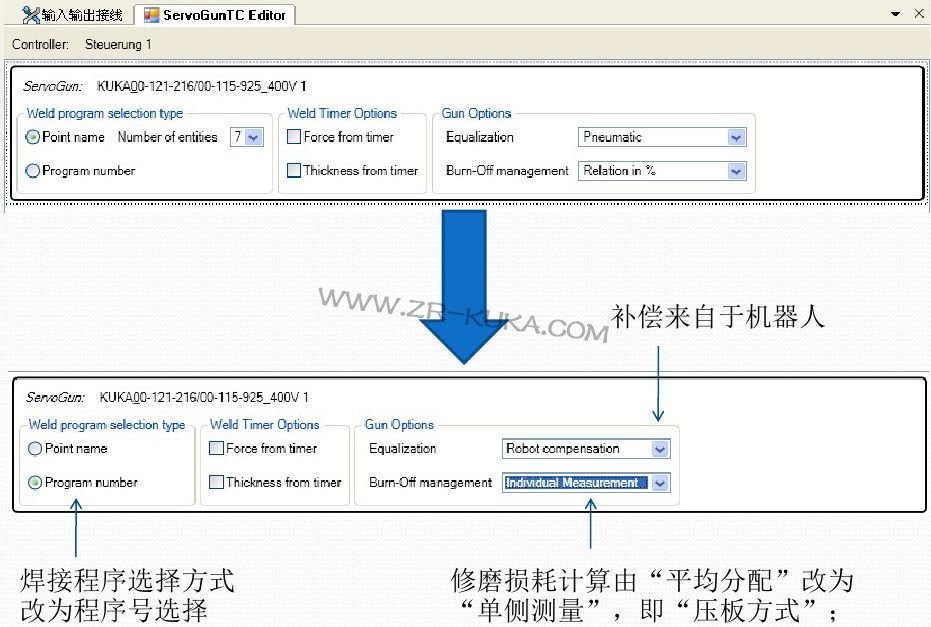
��ԓ�
�Ըɾ��w�Ʌ���ÿ�ј��ĺ��������ļ��

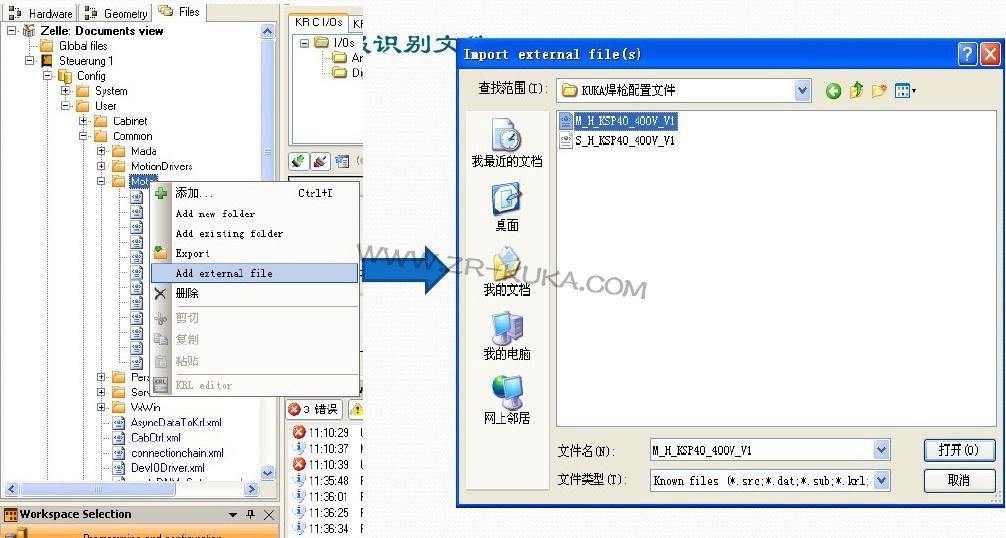
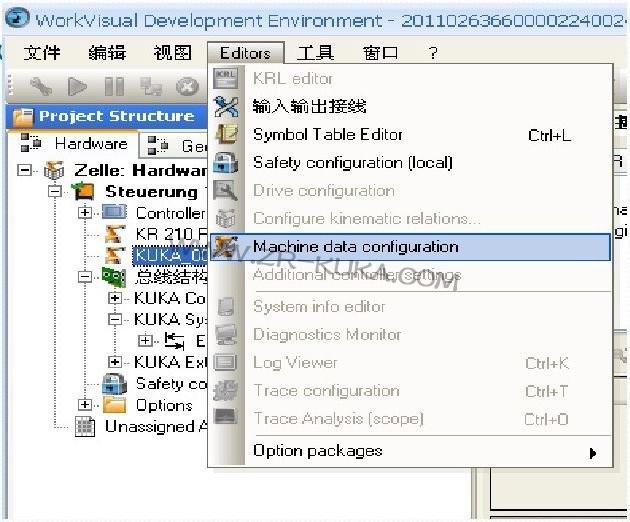
15.�����Ŀ�����g�Ŀ�����d���C����