



�����쿨�C�����ⲿ����cell�����ĺͳ���
1���ⲿ����cell.src�������½�ģ��
DEF Cell ( )
;EXT EXAMPLE1 ( )
;EXT EXAMPLE2 ( )
;EXT EXAMPLE3 ( )
INIT
BASISTECH INI
CHECK HOME
PTP HOME Vel= 100 % DEFAULT
AUTOEXT INI
LOOP
P00 (#EXT_PGNO,#PGNO_GET,DMY[],0 )
SWITCH PGNO ; Select with Programnumber
CASE 1
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE1 ( ) ; Call User-Program
CASE 2
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE2 ( ) ; Call User-Program
CASE 3
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE3 ( ) ; Call User-Program
DEFAULT
P00 (#EXT_PGNO,#PGNO_FAULT,DMY[],0 )
ENDSWITCH
ENDLOOP
END
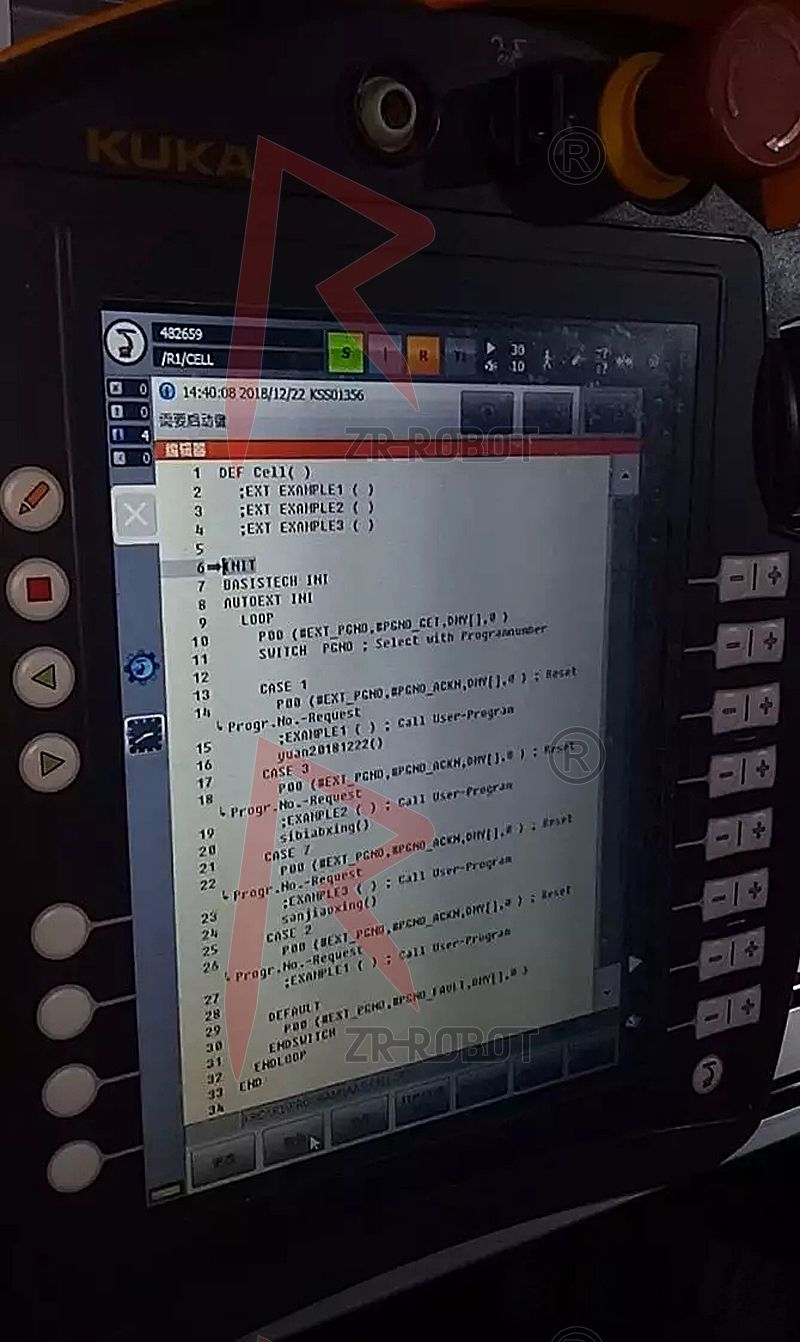
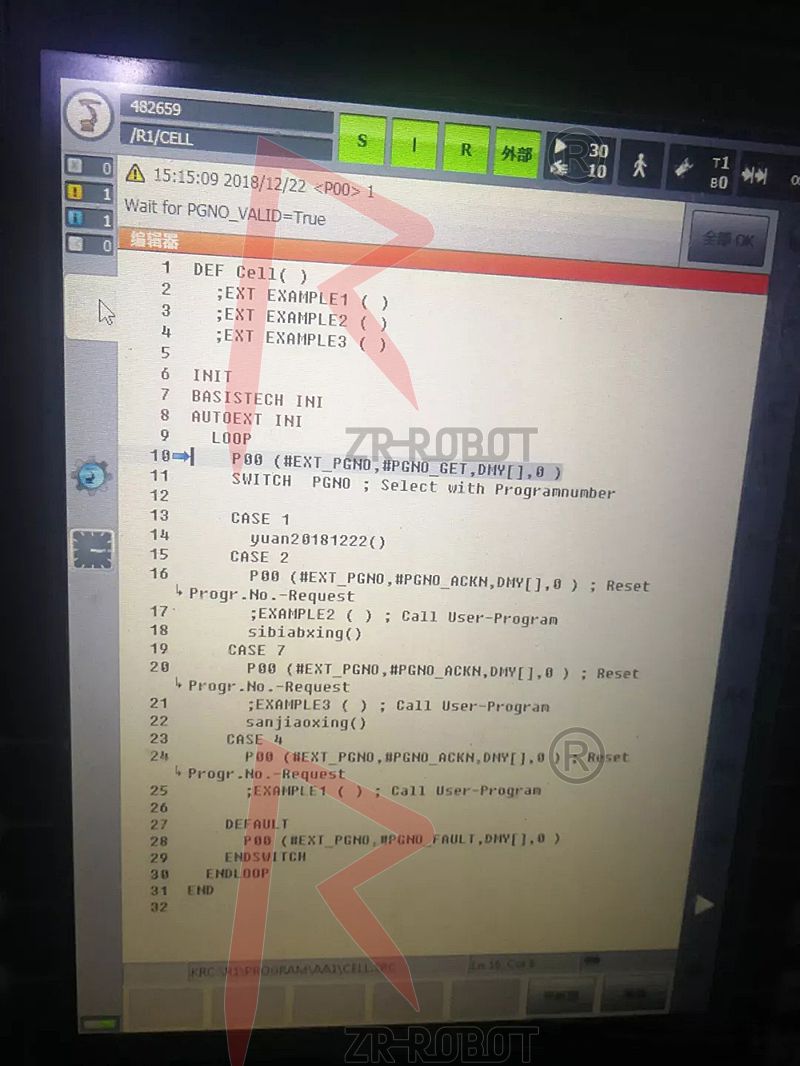
2���ⲿ����cell.src�������ĺ�
DEF Cell( )
;EXT EXAMPLE1 ( )
;EXT EXAMPLE2 ( )
;EXT EXAMPLE3 ( )
INIT
BASISTECH INI
AUTOEXT INI
LOOP
P00 (#EXT_PGNO,#PGNO_GET,DMY[],0 )
SWITCH PGNO ; Select with Programnumber
CASE 1
yuan20181222()
CASE 2
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE2 ( ) ; Call User-Program
sibiabxing()
CASE 3
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE3 ( ) ; Call User-Program
sanjiaoxing()
CASE 4
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE1 ( ) ; Call User-Program
DEFAULT
P00 (#EXT_PGNO,#PGNO_FAULT,DMY[],0 )
ENDSWITCH
ENDLOOP
END
3�����������ӳ���
��1��yuan20181222() ȫ���ӳ���A
DEF yuan20181222( )
INI
PTP P6 Vel=100 % PDAT1 Tool[1]:TOOL1 Base[0]
LIN P1 Vel=1 m/s CPDAT1 Tool[1]:TOOL1 Base[0]
CIRC P2 P3 Vel=1 m/s CPDAT2 Tool[1]:TOOL1 Base[0]
CIRC P4 p1 Vel=1 m/s CPDAT3 Tool[1]:TOOL1 Base[0]
PTP p6 Vel=100 % PDAT2 Tool[1]:TOOL1 Base[0]
END
��2��sibiabxing() ȫ���ӳ�����߅��
DEF SIBIABXING( )
INI
PTP P1 Vel=100 % PDAT1 Tool[1]:TOOL1 Base[0]
LIN P2 Vel=1 m/s CPDAT1 Tool[1]:TOOL1 Base[0]
LIN P3 Vel=1 m/s CPDAT2 Tool[1]:TOOL1 Base[0]
LIN P4 Vel=1 m/s CPDAT3 Tool[1]:TOOL1 Base[0]
LIN P5 Vel=1 m/s CPDAT5 Tool[1]:TOOL1 Base[0]
LIN P2 Vel=1 m/s CPDAT4 Tool[1]:TOOL1 Base[0]
PTP P1 Vel=100 % PDAT3 Tool[1]:TOOL1 Base[0]
END
��3��sanjiaoxing() ȫ���ӳ���������
DEF SANJIAOXING( )
DECL INT C
INI
PTP P1 Vel=100 % PDAT1 Tool[1]:TOOL1 Base[0]
FOR C=1 TO 3
LIN P2 Vel=1 m/s CPDAT1 Tool[1]:TOOL1 Base[0]
LIN P3 Vel=1 m/s CPDAT2 Tool[1]:TOOL1 Base[0]
LIN P4 Vel=1 m/s CPDAT3 Tool[1]:TOOL1 Base[0]
LIN P2 Vel=1 m/s CPDAT4 Tool[1]:TOOL1 Base[0]
ENDFOR
PTP P1 Vel=100 % PDAT2 Tool[1]:TOOL1 Base[0]
END
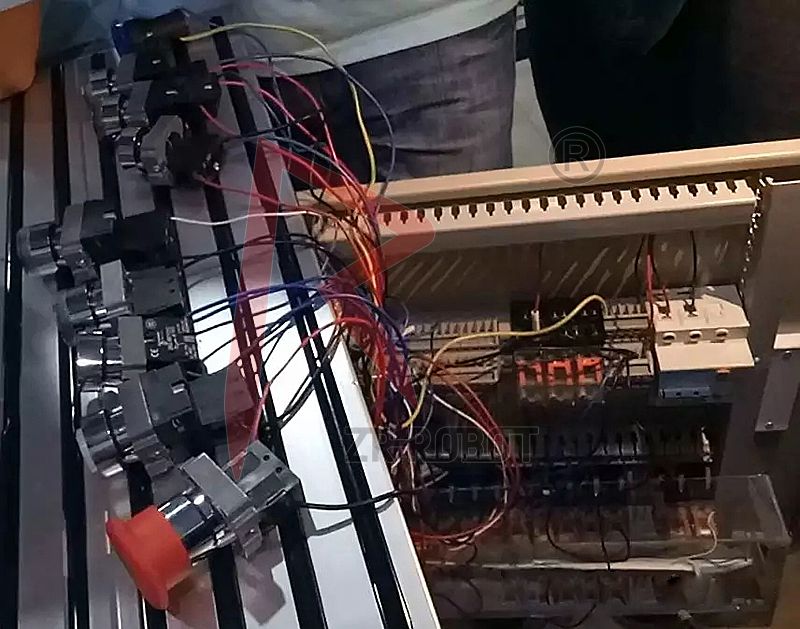
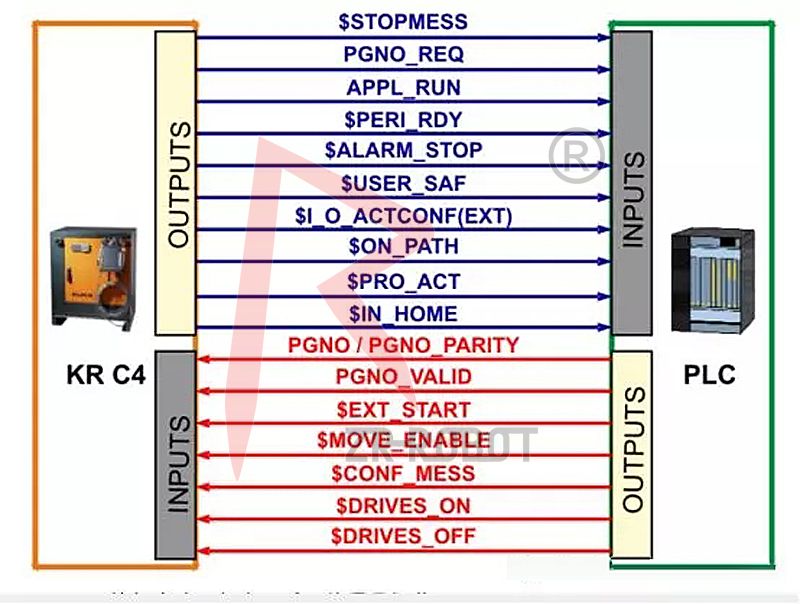
�����ⲿ���Ӹ��IO�����f��
|
��̖ |
ݔ�� ���� |
�������� |
|
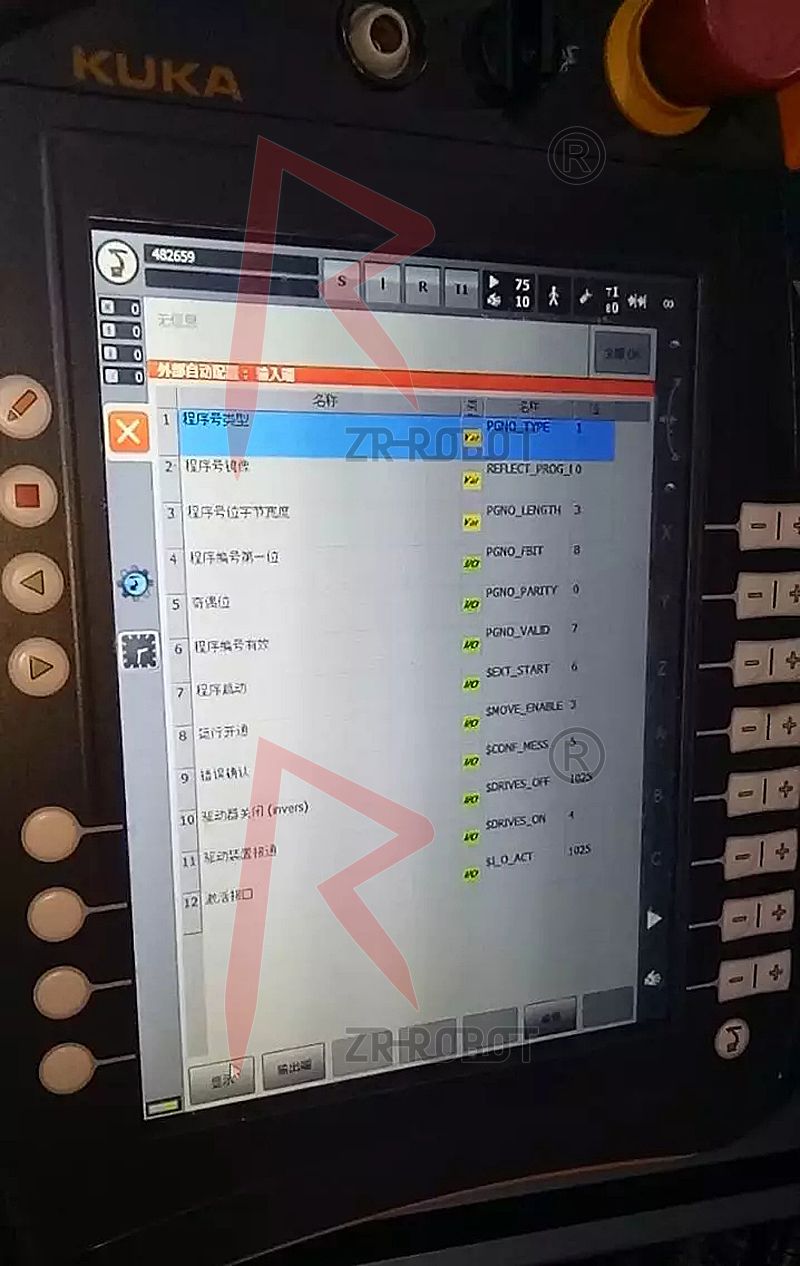
1 |
PGNO_TYPE |
��׃���_�����ԺηN��ʽ���xȡ�ϼ�����ϵ�y���͵ij���̖�� ��1ֵ�r���Զ��M�Ɣ�ֵ�xȡ���ϼ�����ϵ�y�Զ��M�ƾ��a����ֵ����ʽ���f����̖�����磺0 0 1 0 0 1 1 1=> PGNO = 39 ��2ֵ�r���� BCD ֵ�xȡ���ϼ�����ϵ�y�Զ��M�ƾ��aС��ֵ����ʽ���f����̖�����磺0 0 1 0 0 1 1 1=> PGNO = 27 ��3ֵ�r���� “N �x 1” ����ʽ�xȡ ���ϼ�����ϵ�y������O���� “N �x 1” �ľ��aֵ���f����̖��0 0 0 0 0 0 0 1=> PGNO = 1��0 0 0 0 1 0 0 0=> PGNO = 4 |
|
2 |
PGNO_LENGTH |
����̖�L�ȣ���׃���_�����ϼ�����ϵ�y���͵ij���̖��λ���� ֵ�� 1 … 16���� PGNO_TYPE ��ֵ�� 2���tֻ���Sλ���� 4��8��12 �� 16�� |
|
3 |
PGNO_PARITY |
����̖����żλ�� ֵؓ������Уֻ�xȡ�攵�� 0���o�������攵��ż�����R�e�� ��������żУֻ�xȡż�� ��� PGNO_TYPE ֵ�� 3���t PGNO_PARITY ���������� |
|
4 |
PGNO_VALID |
����̖��Ч���ϼ�����ϵ�y�����xȡ����ָ̖���ݔ��� ֵؓ������̖���}�_�½��ؑ��þ�̖ 0���ھ�· EXT_START ̎�S����̖���}�_�����ؑ��þ�̖�� ��ֵ������̖���}�_�����ؑ��þ�̖�� |
|
5 |
$EXT_START |
�ⲿ���ӣ��O����ԓݔ��˺�ݔ�� / ݔ���ӿڼ���r�����ӻ��^�mһ������ ��һ��� CELL.SRC�����H������̖���}�_�����ء����ⲿ�Ԅ��\���Пo BCO �\�С� �@�������C�����چ���֮���Ծ����O�����ٶ� ���]�Мp�٣����_��һ�������O����λ�ã����Ҳ�ͣ����� |
|
6 |
$MOVE_ENABLE |
���S�\�У�ԓݔ����������ϼ����������C���������M�Йz�顣 TRUE �����ք��\�к͈��г��� FALSE ��ͣס�������b�ò��i�����м����ָ�� �����b�����ϼ�������ͣס���@ʾ “ �_ͨȫ���\�� ” ����Ϣ��ʾ�� �h����ԓ��Ϣ��ʾ�������°l���ⲿ������̖��C���˲��������\�ӡ�Ͷ���\�Еr׃�� $MOVE_ENABLE �����OӋ��ֵ $IN[1025]�� ����˺���ӛ�OӋ��һ��ݔ��ˣ��t�����ⲿ���ӡ� |
|
7 |
$CONF_MESS |
�_�J��Ϣ��ʾ���e�`��λ����ͨ�^�oԓݔ����xֵ��������ԭ���ų����ϼ����������Լ��_�J������Ϣ����������Ч�� |
|
8 |
$DRIVES_ON |
���b�ý�ͨ������ڴ�ݔ�����ʩ���˳��m���� 20 ����ĸ��}�_���t�ϼ�����ϵ�y����ͨ�C�������b�á� |
|
9 |
$DRIVES_OFF |
���b���P�]������ڴ�ݔ�����ʩ���˳��m���� 20 ����ĵ��}�_���t�ϼ�����ϵ�y���P���C�������b�á� |
��2���C����ݔ������̖�������x
|
��̖ |
ݔ�� ���� |
�������� |
|
1 |
$ALARM_STOP |
�o��ֹͣ�����F�o��ֹͣ�r�ɏ�ݔ���� $ALARM_STOP �� Int. NotAus �Ġ�B�������ķN�o��ֹͣ���ɂ�ݔ���˾��� FALSE�� �|�l�ˎ쿨������� ��KCP���ϵľo��ֹͣ���I$ALARM_STOP FALSE�� Int. NotAus TRUE�� �ⲿ�o��ֹͣ ԓݔ���ˌ��ڳ��F���¾o��ֹͣ���Εr��λ�� 1)�����ˎ쿨������� ��KCP���ϵľo��ֹͣ���I�����Ȳ��o���P�ࣩ 2)�ⲿ�o��ֹͣ |
|
2 |
$USER_SAF |
�����ˆT���o�b�� / ���o�T:ԓݔ�����ڴ��_�o��ԃ���_�P ���\�з�ʽ AUT������_�_�J�_�P ���\�з�ʽ T1 �� T2���r��λ�� |
|
3 |
$PERI_RDY |
���b��̎�ڴ��C��B:ͨ�^�O����ݔ���˙C���˿���ϵ�y֪ͨ�ϼ�����ϵ�y�C�������b���ѽ�ͨ�� |
|
4 |
$STOPMESS |
ֹͣ��Ϣ:ԓݔ�����əC���˿���ϵ�y���O���������ϼ��������@ʾ���F��һ�lҪ��ͣס�C���˵���Ϣ��ʾ�� �����磺 �o��ֹͣ���I���\���_ͨ������ˆT���o�b�ã� |
|
5 |
$I_O_ACTCONF |
�ⲿ�Ԅ��\�м���:�x�����ⲿ�Ԅ��\���@һ�\�з�ʽ����ݔ��� $I_O_ACT �� TRUE��һ��ʼ�K�O�� $IN[1025]����ݔ���˞� TRUE�� |
|
6 |
$PRO_ACT |
���� / �����\��:��һ���C���ˌ����ϵ��^�̼���r��ʼ�K�oԓݔ�����xֵ�� ��̎��һ��������Д��r���^�̞鼤���B�� ����Y���r�ij���̎��ֻ���������}�_ݔ���˺��|�l����̎���ꮅ֮���ҕ��δ��� |
|
7 |
PGNO_REQ |
����̖��ԃ����ԓݔ������̖׃���r��Ҫ���ϼ�����������һ������̖����� PGNO_TYPE ֵ�� 3���t PGNO_REQ ���������� |
|
8 |
APPL_RUN |
���ó������\���У��C���˿���ϵ�yͨ�^�O�ô�ݔ���ˁ�֪ͨ�ϼ�����ϵ�y�C��������̎�����P���� |
|
9 |
$IN_HOME |
�C����λ����ʼλ�� (HOME)��ԓݔ����֪ͨ�ϼ��������C������λ������ʼλ�� (HOME)�� |
|
10 |
$ON_PATH |
�C����λ��܉�E�ϣ�ֻҪ�C����λ�ھ����O����܉�E�ϣ���ݔ���˼����xֵ�� ���M���� BCO�\�к�ݔ���� ON_PATH �����xֵ�� ݔ���˱��ּ��ֱ���C�����x�_��܉�E�������λ���x�����Z�䡣 ����̖ ON_PATH �o��������C����һ�x�_܉�E��ԓ��̖���λ�� |
|
ϵ�yݔ����̖ |
Ӳ��ݔ����̖ |
|
in1-in16 |
di1-di16 |
|
ϵ�yݔ����̖ |
Ӳ��ݔ��̖ |
|
out1-out16 |
do1—do16 |