һ.Ӳ����
|
1 |
�C���� |
�쿨KR30 HA�߾��șC���� |
|
2 |
PLC |
����ʿPLC��̖��KV7500 |
|
3 |
ͨӍ��ʽ |
����ͨ�^Ethernet/IP�f�h�M��ͨӍ:PLC����Scanner,�C������Adapter |
��.ܛ����
| ��̖ | ܛ���� | �汾 |
| 1 | �쿨����ϵ�y-KSS | KSS8.3.36 |
| 2 | �쿨����ܛ��-Workvisual | 4.0.29 |
| 3 | ܛ����-KUKA.Ethernet/IP | V2.0.3 Build15 |
| 4 | ����ʿPLCܛ��-KV Studio | Ver 9.42 |
��.�C����Etherne/ip��վ�����ļ�
�ļ�����KRC4ScannerAdapter.eds
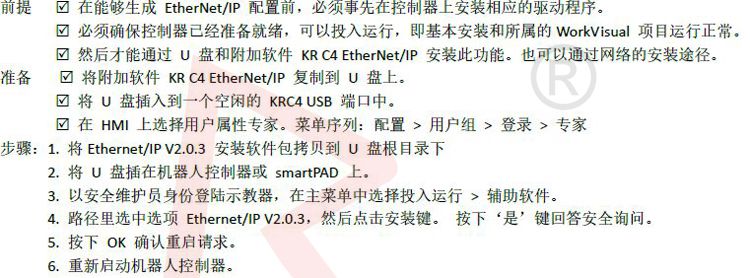
��.���bEthernet/IPͨӍ��
��.Workvisual����
1.���Pӛ����X�c�C�����B�����dWorkvisual�Ŀ��
1)��ʾ������->“Ͷ�\��”->�W�j���鿴�C���˵�IP��ַ���þW�������b��Workvisual�ĹPӛ����X�͙C���˿��ƹ�PC��KLI�˿ڣ�ͬ�r�Ă�����X��IP��ַ�����C��XIP��ַǰ��λ�c�C���˵�IP��ַ��ͬ�����һλ��ͬ����C����IP“172.31.164.1”���t��XIP�����Ğ�“172.31.164.4”��
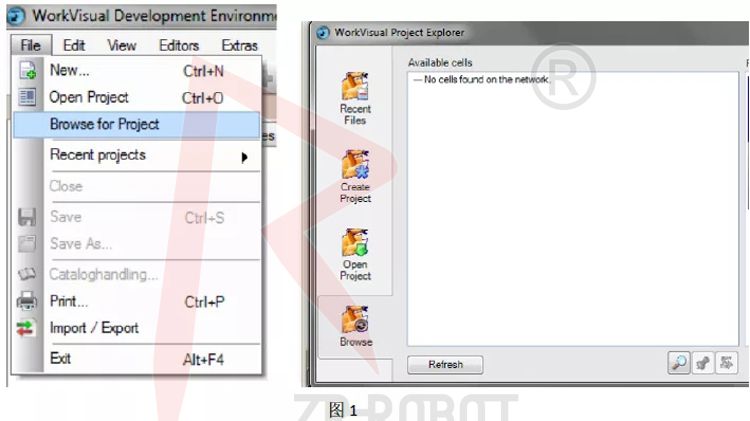
2)��X�ϴ��_WorkVisual���c��File->Browseforproject���ڏ����Į�����Γ�refresh��
��availablecells�����c�����_��ǰ���Ŀ����D1
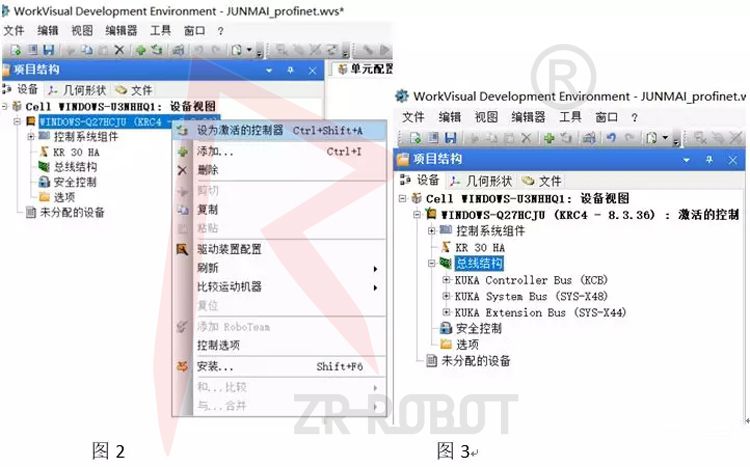
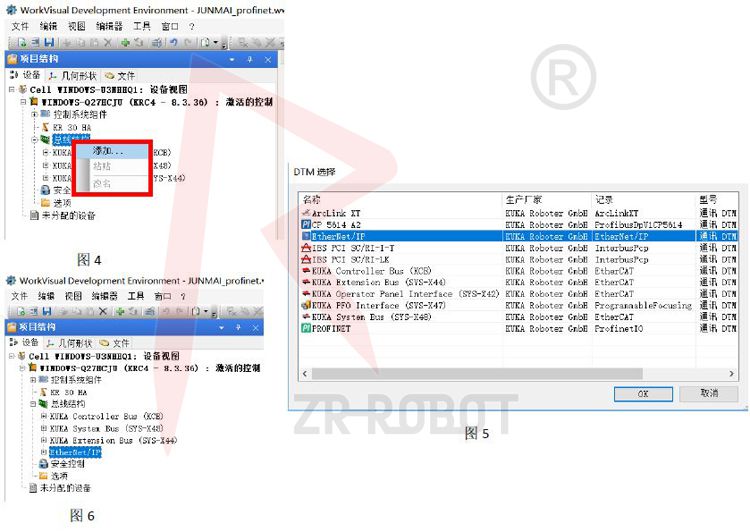
2.��D2�����Ŀ�����Ŀ�������D3ԓ�Ŀ�Ŀ����Y�����@ʾ�����N�����Y������KCB,KEB�ȣ�
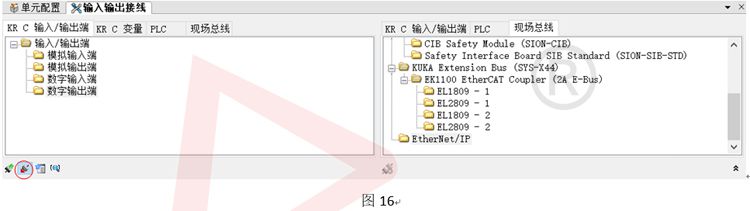
3.���I�Γ������Y��,����������D4�tɫ�^��Ȼ���c�����ӏ����D5�D����ԓ����x��Ethernet/IP���c��ԓ�D���OK�I������ӣ��˕r�����ڿ����Y�����濴��Ethernet/IP��������D6��ʾ��
4.������I�p����D7�{ɫ�^���Ethernet/IP�M�������ý���(��߅��)��
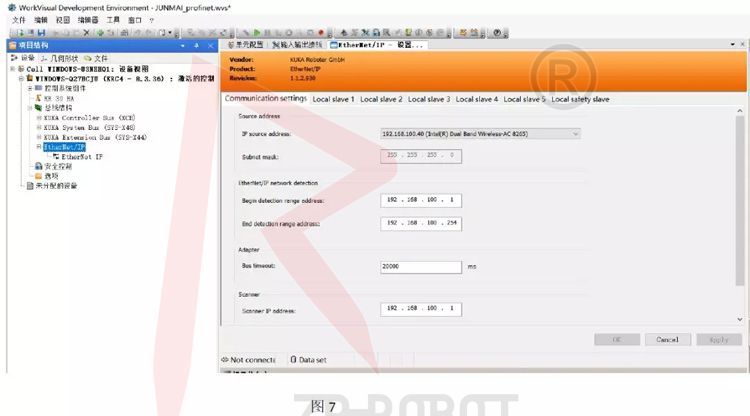
5.Ethernet/IP�O�ã�
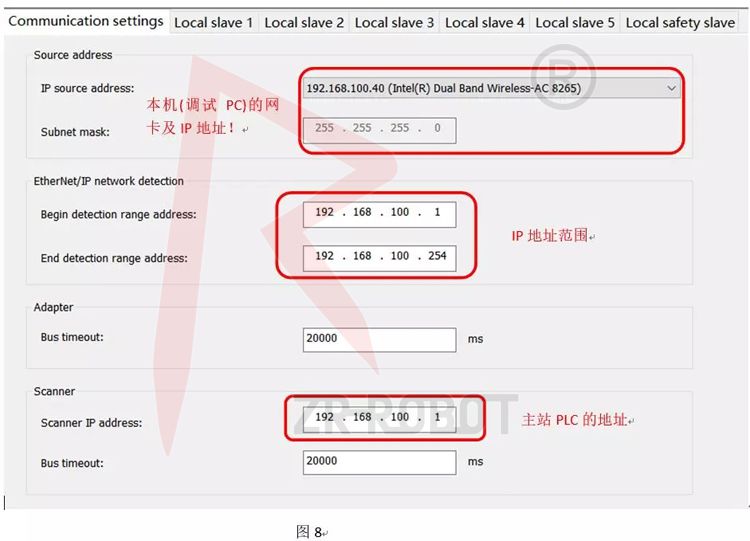
A.ͨӍ�O��(���H��IP��ַҪ�������H��r��)��
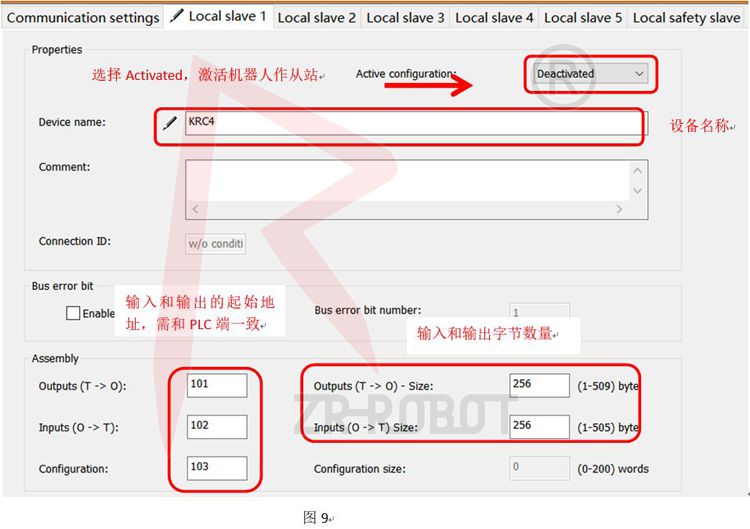
B.�C��������վ�O�ã�
6.IOMapping���ã�
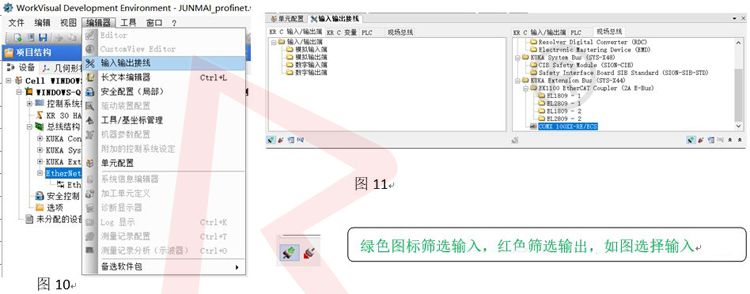
a.��D10�c������->ݔ��ݔ���Ӿ����M�������D11,����x����ݔ��ˣ���߅�ҿ���Ethernet/ip
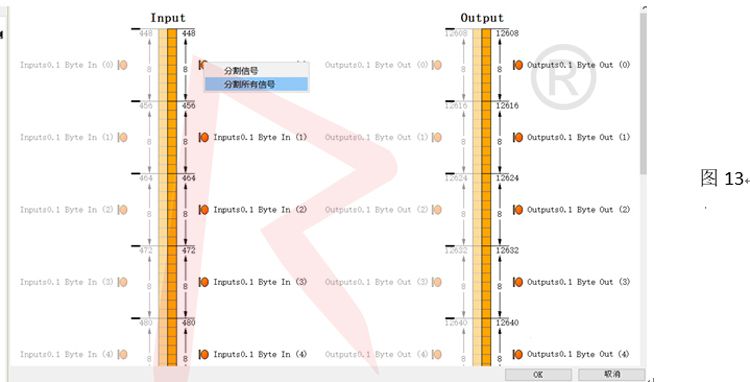
b.��BYTE�ָ��BIT��ͣ������½��ҵ����c����̖���D�ˣ���D12�tɫ�^��Ȼ���M��D13���x��ָ�������̖���c��OK�I��

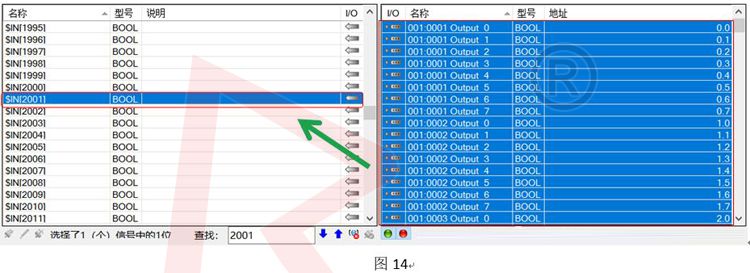
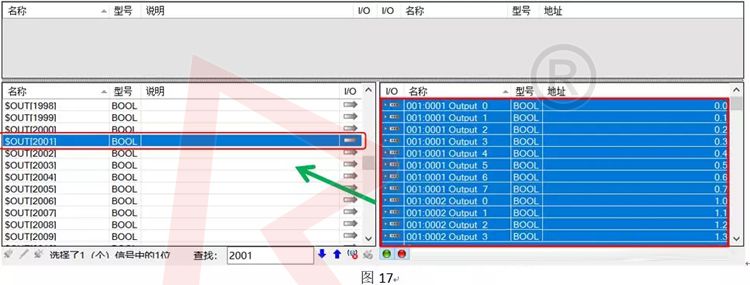
c.�ָ�����M��D14������x��C����ݔ�����ʼλ�ã�����߅����CTRL+A�x��PLC��������̖������������߅�C���˵���ʼλ�ã���$IN[2001],朽���ɺ��Կ�����D15�ļtɫ�^��ʾӳ����ɣ�
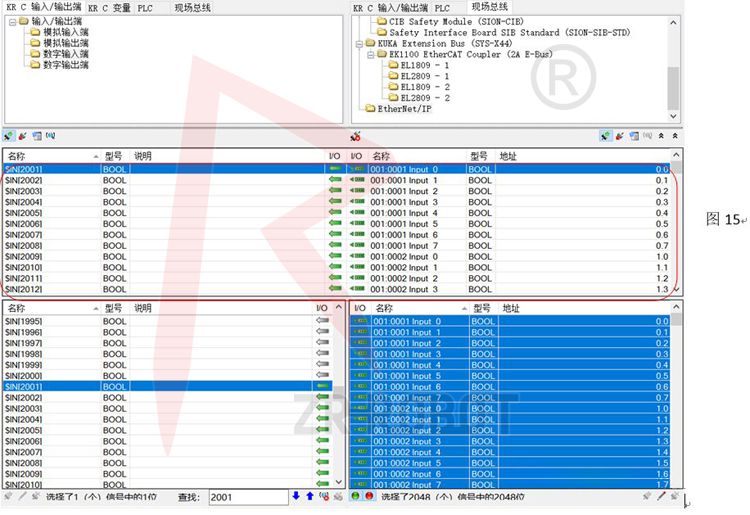
d.ͬ�����x����ݔ����������D16�������M�ЙC����ݔ�����cPLC����̖ӳ�䣻
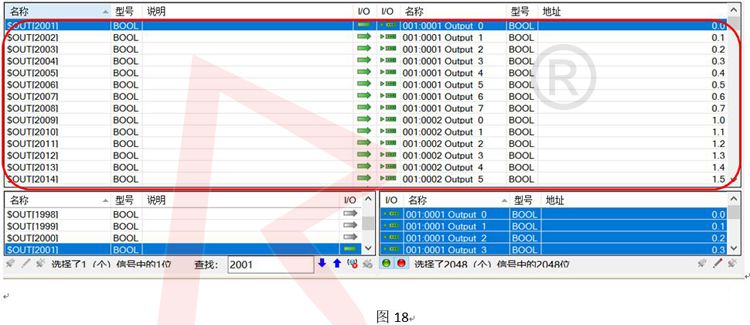
e.�D17������x��C����ݔ������ʼλ�ã�����߅����CTRL+A�x��PLC��������̖������������߅�C���˵���ʼλ�ã���$out[2001],朽���ɺ��Կ�����D18�ļtɫ�^��ʾӳ����ɣ�
7.������ú��Ŀ���d���C���˿������
A.�Ԍ��ҵ�ģʽ���ʾ����
B.Workvisual���c��deploy,���Ŀ���Ì��뵽�C���˿��ƹ��У��^���У���Ҫ��ʾ�����ϴ_�J��ʾ��Ϣ��
C.��ɺC�����؆���

��.����ʿPLC����
1.��PLC�����������d�Ŀ���{ԇPC��
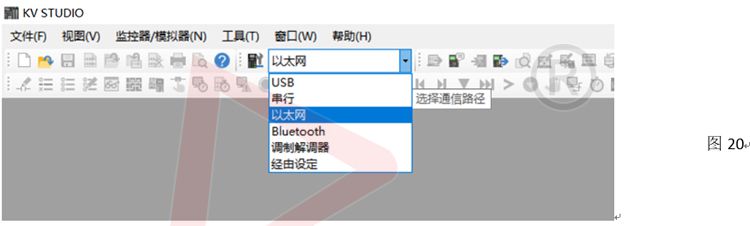
A.���_��������ܛ��KVStudio,�x���{ԇPC�cPLC�������B�ӷ�ʽ��D20���x������̫�W(����IP��ͬһ�W��)
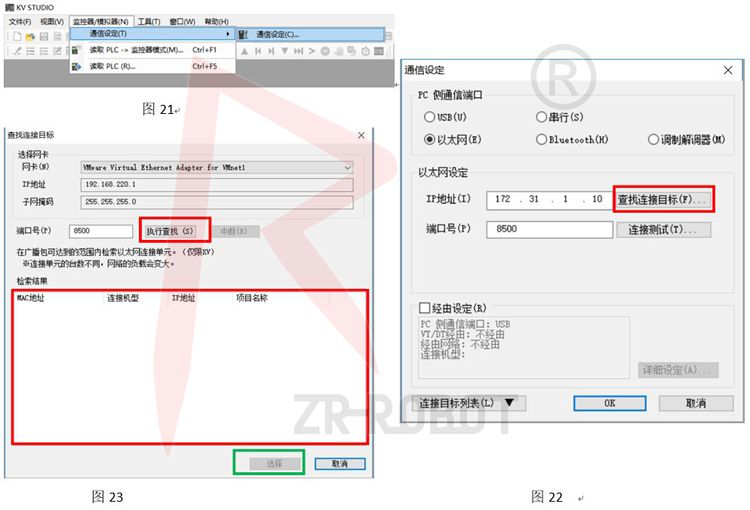
B.���_���x��l��O����/ģ�M��->ͨ���O��(T)->ͨ���O��(C)��D21���M�����D22���c���tɫ߅���I�����B��Ŀ�ˣ��˕r�M��D23���棬���в���PLC�����������б��鵽�Ŀ����������ڙz���Y�������@ʾ���˕rֻ���ڙz���Y�������ҵ���Ҫ���B�ӵĿ������������Gɫ�ڵİ��I��ɿ��Ƶ��x��
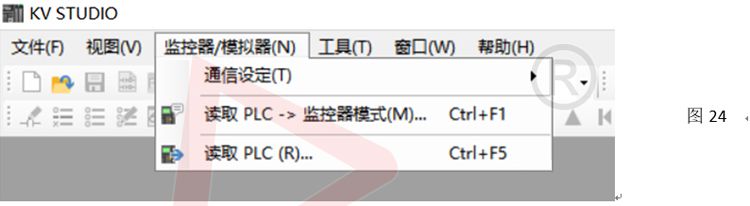
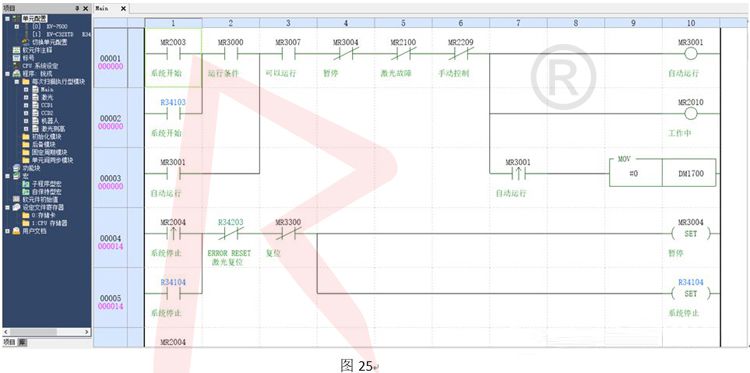
C.����x��O����/ģ�M���ˆ�(�D24)�x���xȡPLC���{ԇPC������PLC���������d����(�D25)��
2.������������Ethernet/IP:
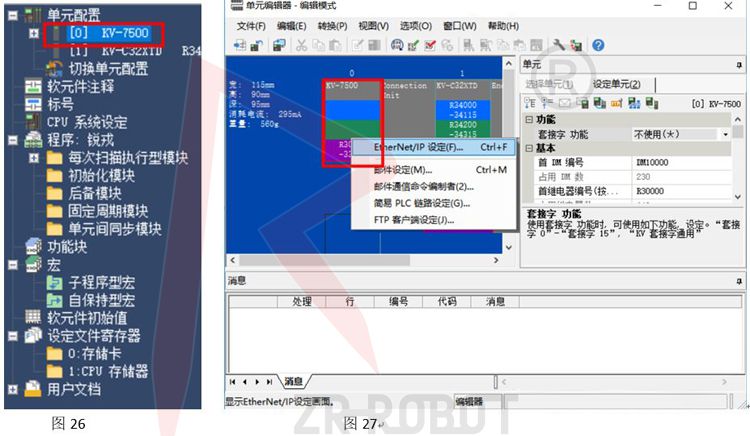
A.����D26����������I�p��������KV-7500(��tɫ�^��)���M����D27�Ć�Ԫ���ڣ�������I�Γ�D�мtɫ�^���PLC������KV-7500���x��Ethernet/IP�O�����M��Ethernet/IP���ã�
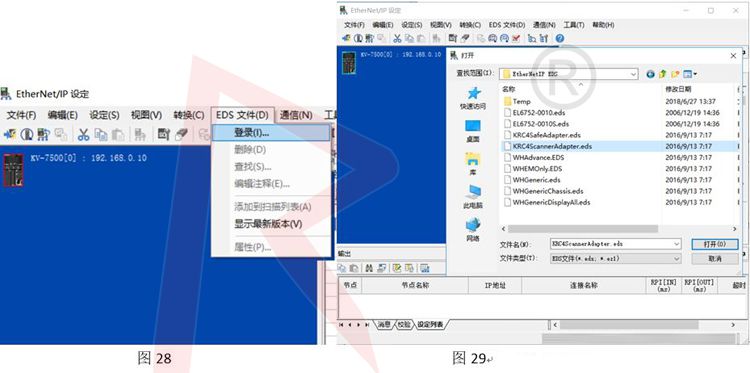
B.��D28�x��EDS�ļ�(D)�ځ����әC���˵��O�������ļ������µ�ꑺ��M��D29���棬���{ԇPC���ҵ��C���˵��O�������ļ������x����_��
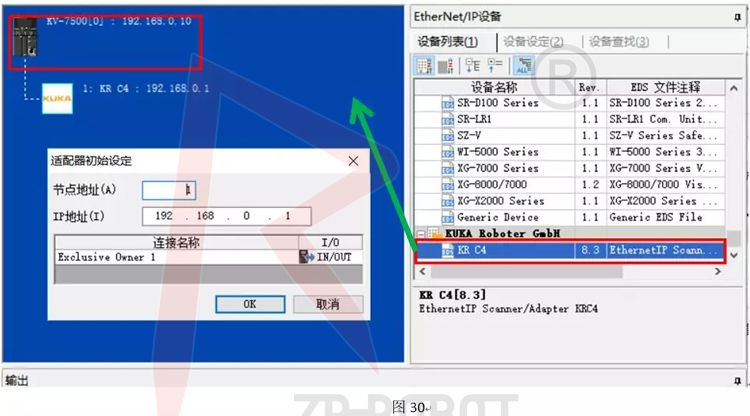
C.��D30�����҂�Ethernet/IP�O������ҵ��C���ˣ��x�к�����������߅�������£��˕r�������O�ÿ������m����(��վ)��ʼ�O����IP�O�����Y�c��ַ�O��������c��OK��
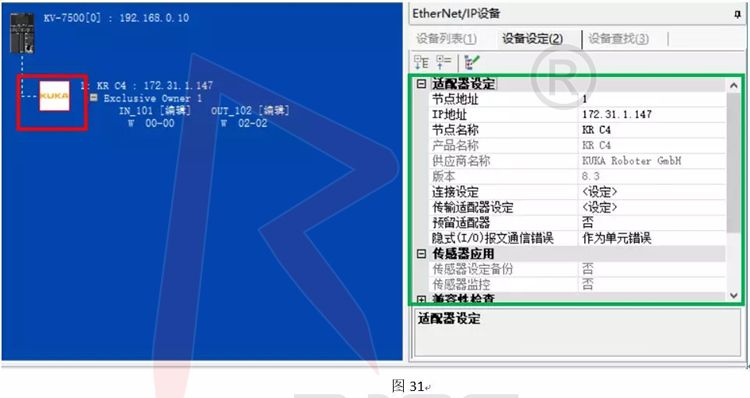
D.������I�Γ���D31�ļtɫ�^���O���ԓ�m����(��վ)�O����Ϣ������߅�Gɫ�����@ʾ���˕r���Ը�����Ҫ����Ϣ����IP��ַ/���c��ַ/���c���Q(���c�C���˶�һ��)��
E.������I�Γ���D32�ļtɫ�^��ExclusiveOwner1��������߅�Gɫ����ԓ�����c���O���M�����������O�ý��棻
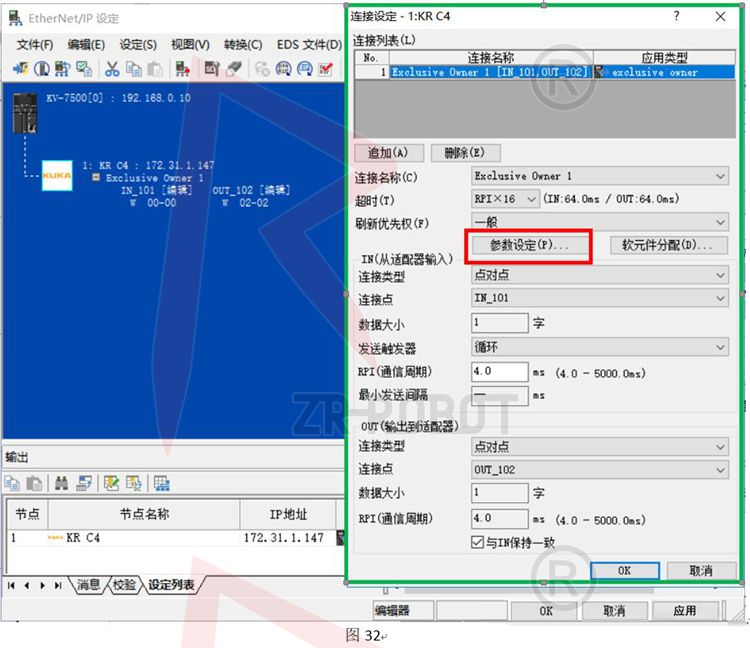
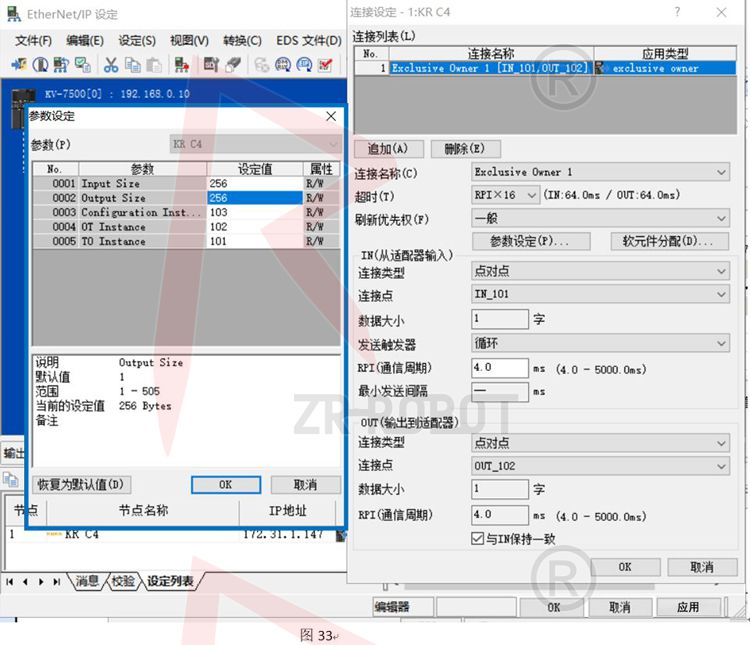
F.����D33���{ɫ�����O�������O�ÙC���˵ą�������ݔ��ݔ���L�ȣ�OT/TO��������(���c�C���˶��O��һ��)����ɺ��c��OK������ã�
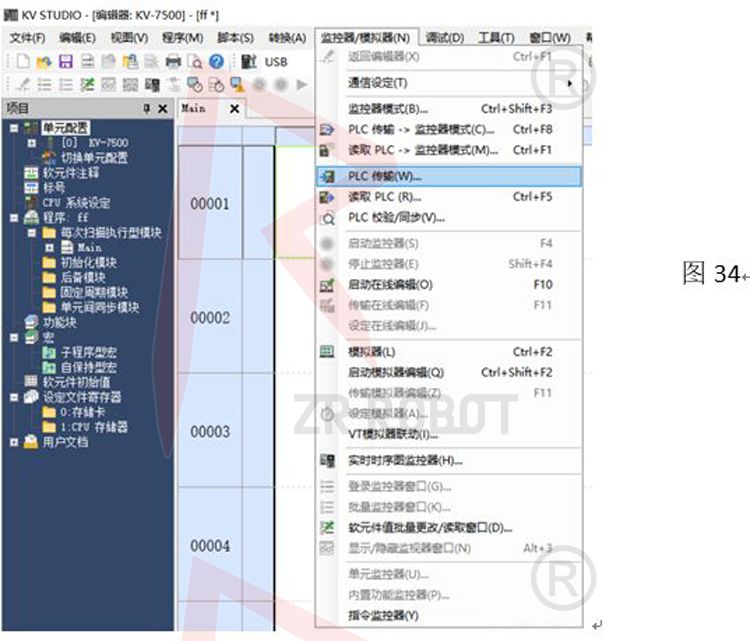
G.�ص������棬��D34���ڱO����/ģ�M�����x��PLC��ݔ�������Ŀ�ϴ���PLC���������ھ��O�ض��ߔ��������Ƿ�һ��(PLC->Robot,Robot->PLC)