



KUKA�C����6 �S��λУ�ʷ����� EMT��
һ���քӠ�BT1�����S����ϵ�����C����1 ��6 �S�քe�Ƅӵ���ԭʼ���c������Ŀ�yÿ���S�ϵăɂ���λ�^��ȱ��Ҫ���ʡ�

���� ��EMT ���b���S1 ��У���λ�ȣ�����һ���B�ӵ��C���˵����ϵ�X32 ��ڡ�

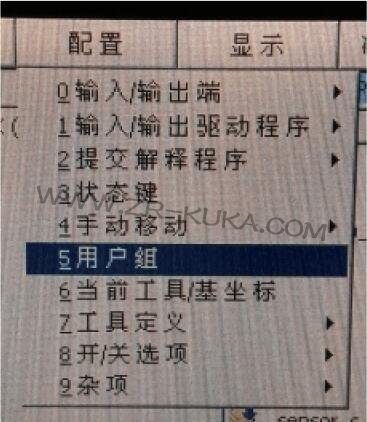
��������KUKA�����ֱ��������x�����²ˆ��M����λУ��ģʽ��
1. ������M
2. �x���ң��ܴakuka
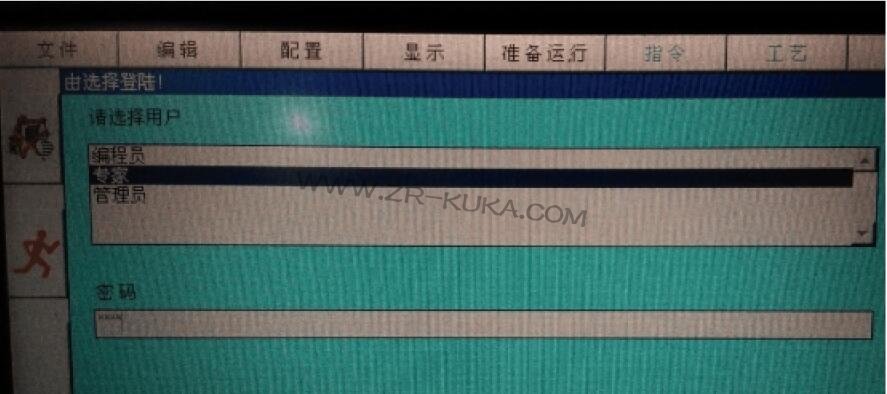
3. �x��ʂ��\�У����cУ������Ӝy����
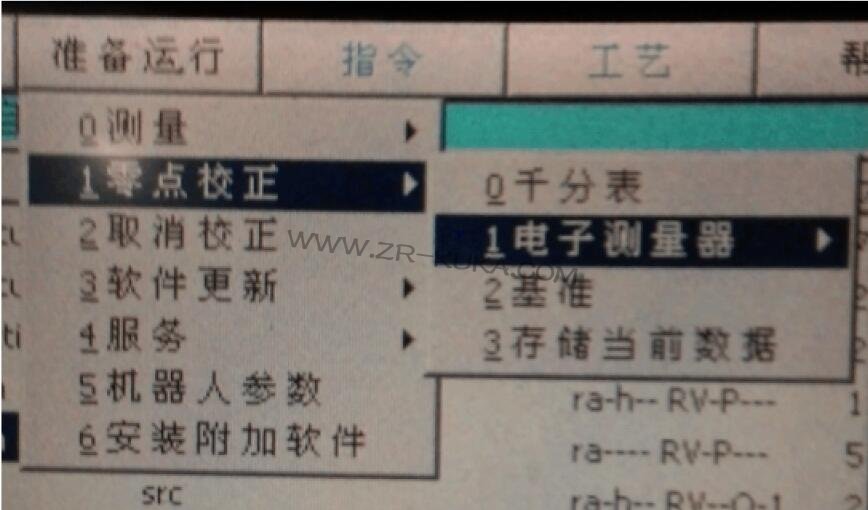
4. �˜ʣ��z�����cУ��
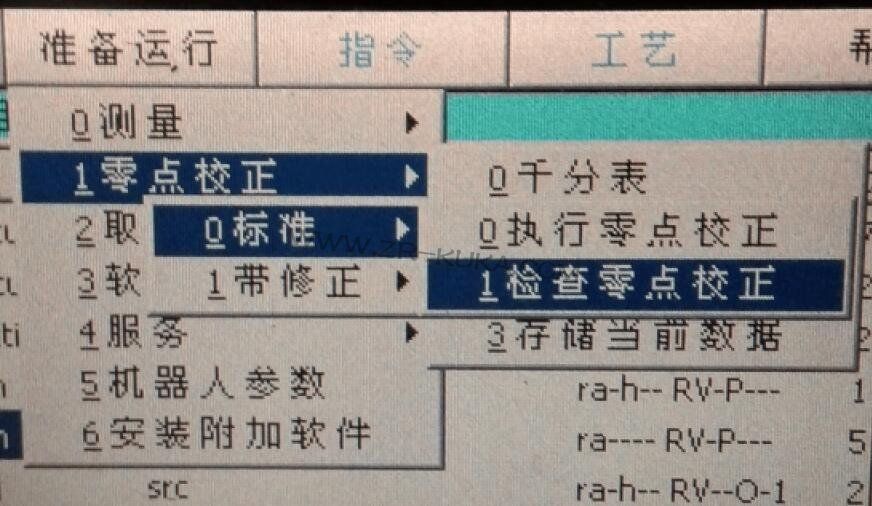
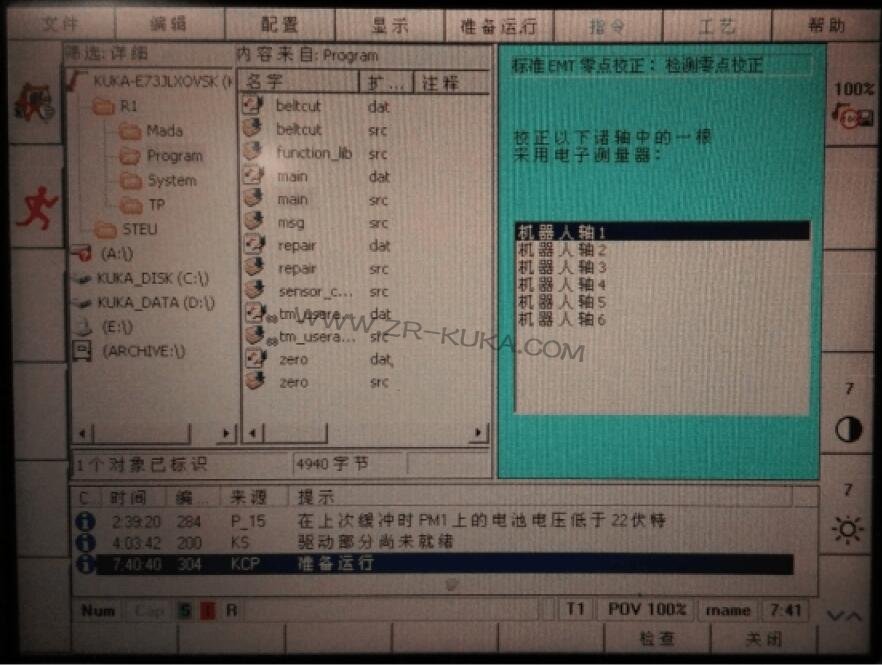
5. �x��C�����S1�����·�����Ϣ��գ����ְ�ס�ֱ�������Ӱ��I�����ӈD��“I׃”�ɾGɫ����”�z��“���o������ܛ�I���ڕ����F�ʂ�;w�֘ӡ��˕r�S1 �ѽ��_ʼ�ӣ������^�쵽EMT�ϵăɂ��Gɫָʾ�����Ƀɂ�ȫ��׃��ֻ��1 ���������S�����һ��У�ʽY�����@�r���У�ʺ���λ�c�F��λƫ���С����ֱ�ӕ��@ʾ”�S1 ��λУ�ʽY��“�����У�ʺ���λ�c�F��λƫ��ޣ��t�����҂���Ϣ���@ʾУ��ǰ��Ĕ�����e���������a���aֵ��ͽǶȲ��Ҫ�x��”�惦”����������λУ�ʡ�
6. ��EMT�Ƅӵ��S2 ��У���λ�ȣ���һ����Ȼ�B�ӵ��C���˵����ϵ�X32 ��ڣ����҂���Ϣ���x��C�����S2�������������E���S2 �M����λУ��
7. ���Ό����µ�4 ���S�M����λУ��
�ġ� ���^���ꮅ���ք�ģʽ�����\��“�S��”�����C���˴S��λ���^���г̺�λ���Ƿ���������������֮�����\���������ք����ٻ�HOME �c���^���г̺�λ���Ƿ����������������t�M���^�Ϝyԇ��
�塣 ���M����λУ�ʵ���KR150��C���ˣ���ô�ڽ��ϵ�y늿ع���������x��“����KR150�C����”���ڙC����KCP���x��main �����Ԅӣ����ӣ��ȴ��Ԅӌ�����������Ƿ���������һ���������t������λУ�ʽY����