�������C(j��)������δ��(l��i)���ژI(y��)���")
е��C4����ϵ�y(t��ng)�S�ޟo(w��)����")
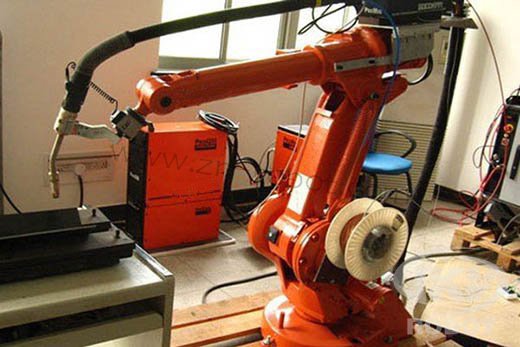
е��KR280�ŷ�늙C(j��)���S�S")
������Ϳ���I(y��)�C(j��)������Ҫ�ɹ��I(y��)�C(j��)���˱��w��Ӌ(j��)��C(j��)������(y��ng)�Ŀ���ϵ�y(t��ng)�M�ɡ��^���M(j��n)�ć�Ϳ���I(y��)�C(j��)���������������ȿ������(g��)���������ֿ��D(zhu��n)��(d��ng)�����(d��ng)������˵������ܷ����ͨ�^(gu��)�^С�Ŀ����빤����(n��i)������Ϳ���(n��i)���档
����Ŀǰ��(gu��)�H�Ј�(ch��ng)�Ϲ���(y��ng)�ć�Ϳ���I(y��)�C(j��)���˴��¿ɷ֞���������Ƿ��������܇��ݔ����\(y��n)�з���ˮƽ�Ƅ�(d��ng)�Ĺ��ܣ��֞鎧܉��ʽ�̶����bʽ���I(y��)�C(j��)���ˣ������bλ�õIJ�ͬ���֞����ʽ�͑ұ�ʽ���I(y��)�C(j��)���ˡ����ʽ���I(y��)�C(j��)���˾������ھS�o(h��)�坍�ă�(y��u)�c(di��n)����܉��ʽ���I(y��)�C(j��)���˄t���й�����������(du��)�^��ă�(y��u)�c(di��n)�����ұ�ʽ���I(y��)�C(j��)���˄t�ɜp�ه������ȳߴ磬�_(d��)���p���ܺĵ����á�
������Ϳ���I(y��)�C(j��)����һ����8�ֽM�ɣ����I(y��)�C(j��)�������w�����C(j��)�����۲����ͽK�ˈ�(zh��)�ЙC(j��)��(g��u)����һ��(g��)�������D(zhu��n)�B�Ӻ�AC�ŷ�늙C(j��)��6�S��7�S(li��n)��(d��ng)��һϵ�еęC(j��)е�B�ӣ�ʹ��݆ϵ��RV�͜p�����������I(y��)�C(j��)���˿�����������ݔ��ij���?q��)��?q��)��(d��ng)ϵ�y(t��ng)�͈�(zh��)�ЙC(j��)��(g��u)�l(f��)��ָ����̖(h��o)�����Ɔ��_(t��i)���I(y��)�C(j��)�����O(sh��)���\(y��n)��(d��ng)܉�E���b�ã���ϵ�y(t��ng)���������_(t��i)����Ҫ�����Ǽ�������(g��)����Ӳ������(sh��)�F(xi��n)ϵ�y(t��ng)�Ԅ�(d��ng)�����ܣ�����ϵ�y(t��ng)�����c���퇊Ϳ���I(y��)�C(j��)���˻��(d��ng)���P(gu��n)��Ӳ�������ϵ�ÿ��(g��)���������P(gu��n)Ӳ��������ˇ���ƹ������̖(h��o)�c���ڵē]�l(f��)��������܄��g������(du��)��ȫ�ӿڣ������̖(h��o)�D(zhu��n)�Q����(d��ng)��̖(h��o)����܇�͙z�y(c��)ϵ�y(t��ng)������(j��)��ͬ�����a(ch��n)�F(xi��n)��(ch��ng)�������a(ch��n)��܇���g�IJ�̶ȣ�ͨ�^(gu��)PLC�����(l��i)�O(sh��)�ò�ͬ��λ�Þ�z�y(c��)λ�ã����{(di��o)���ù���_(k��i)�P(gu��n)�İ��bλ�ã����O(sh��)��һ��(g��)��ȫ�ġ����x�����a(ch��n)�^(q��)��ͨ���ɷքe�ڹ��I(y��)�C(j��)�����Ԅ�(d��ng)��Ϳ�^(q��)�����ںͳ���̎�քe���bһ��(du��)��ȫ��ţ���ֹ�l(f��)������������p���O(sh��)����¹ʣ���܇��ֱ����ۙϵ�y(t��ng)���\(y��n)������܇�Ԅ�(d��ng)��Ϳ���Ĺ��I(y��)�C(j��)���ˣ�����������a(ch��n)��(ji��)�ģ��ڇ�Ϳ���I(y��)�^(gu��)����܇��һֱ���Sݔ��朰����O(sh��)���ٶ�ǰ�M(j��n)��������(hu��)Ó�xݔ��朹̶���ij̎�����I(y��)�C(j��)���ˇ�Ϳ���I(y��)�����Դ��������Դ����